|
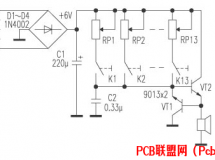
(1)首先我们在进行TRIAC其驱动电路设计的时候,我们一般不直接进行驱动,而是通过DIAC或者Photo-TRIAC即光学的双向可控硅配合来使用进行驱动电路的设计,为什么呢?因为如果直接驱动,其Vgt>0.7V即可,而我们双向可控硅一般都是工作大功率的场合,如果其负载是感性负载则很容易其断开瞬间会产生非常大的感应电动势,甚至其RC缓冲电路其会倒流回双向可控硅的控制电路里面去,然后会很有可能产生大于0.7V的电压出来进而导致误触发,所以基于此我们一般都是不直接进行驱动。我们使用DIAC和Photo-TRIAC,其导通需要压降,其导通压降一般都是10V以上,就算出现上述问题,我们由于其需要大于10V以上才能导通,一般反向感应电动势其倒流回去产生的电压值不会高于10V以上,所以就避免了误触发。TRIAC一般都是用来驱动诸如U马达加热器等等设备,比如说电饭煲,破壁机,养生壶等产品里面,所以出现该问题的几率非常大 (2)基于上述原因我们一般的驱动电路如下: (3)串联的栅极电阻其具体的取值其实是在峰值电流限制和TRIAC触发电流之间的一种平衡,如果取值太大则首先其优势是对photo-TRIAC导通峰值电流进行限制但是与此同时也引出了另外一些问题,一是会产生导通角的变化,二是有可能其电流小于TRIAC的触发电流使得其不能正常的触发 (4)我们具体分析一个案例来说明:
更详细的内容可以参考老白硬件特训班:
| 


















 窥视卡
窥视卡



 置顶卡
置顶卡 变色卡
变色卡