|
描述 MS41939 是一款单通道 5V 低压步进电机驱动芯片,通过具有电流细分的电压驱动方式以及扭矩纹波修正技术,实现了超低噪声微步进驱动。 芯片另外内置一个直流电机驱动器,上下开关的电阻之和低至 1.1 欧姆。 特点 电压驱动方式,256 细分微步进驱动电路(单通道) 每个 H 桥最大驱动电流±0.5A 四线串行总线通信控制马达 内置直流电机驱动,最大驱动电流±0.5A 应用 机器人,精密工业设备 摄像机 监控摄像机 MS41939封装  & C3 e1 \9 x; Z & C3 e1 \9 x; Z
, k, N& F( v! f6 p# X2 A- K内部框图 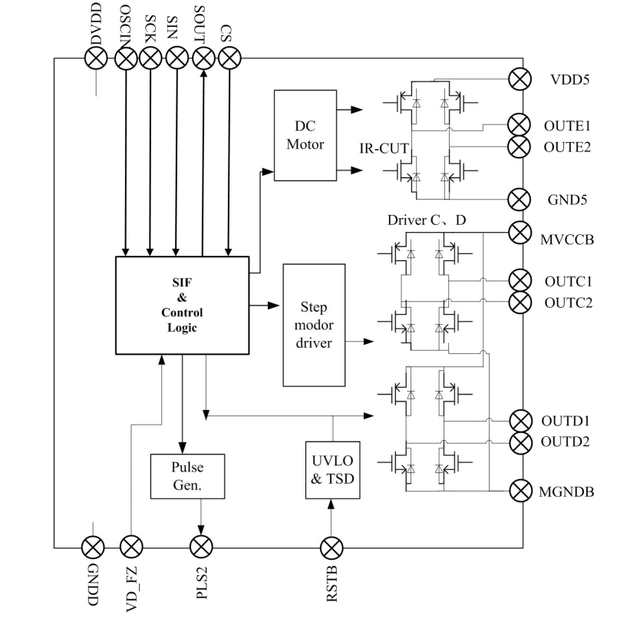
/ j9 X, o( F0 C! h- N
% E% _( s6 g# W% `9 ~1 w管脚排列图 
4 s4 h# z& S1 t6 z4 ~' K' M( o5 i/ ?1 i3 y
管脚说明图 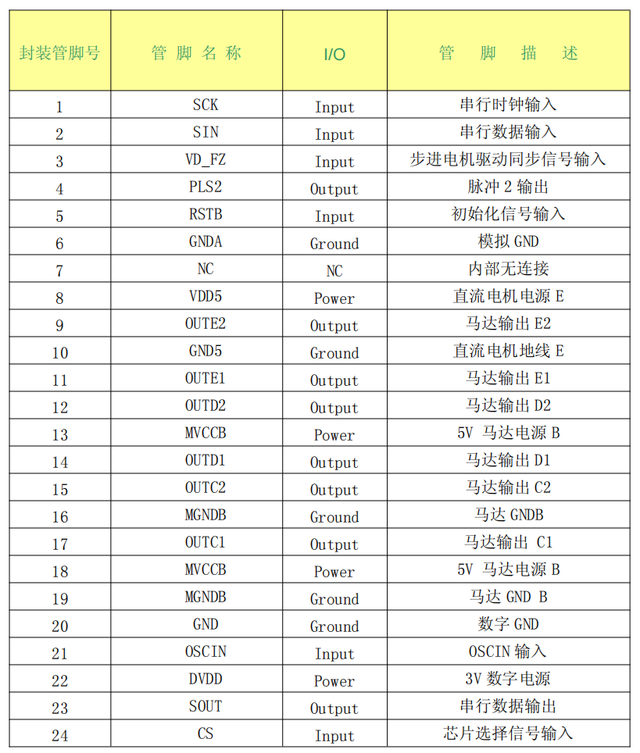 4 j$ {9 A4 y; R) k$ b: [% k2 ^ 4 j$ {9 A4 y; R) k$ b: [% k2 ^
7 A! z& ^( }4 F. U0 t% GD15~D0 写入寄存器的数据 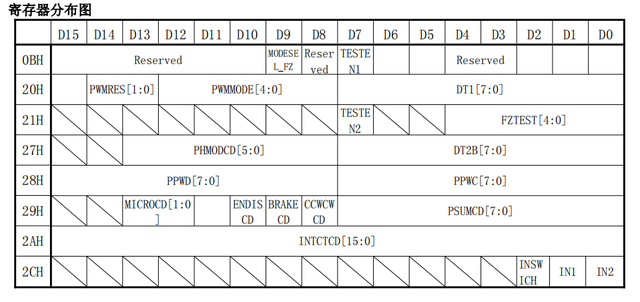 ! q9 E9 }' _! h# w ! q9 E9 }' _! h# w
3 _, m; T0 W. i' r- z. Q0 e- x
寄存器列表 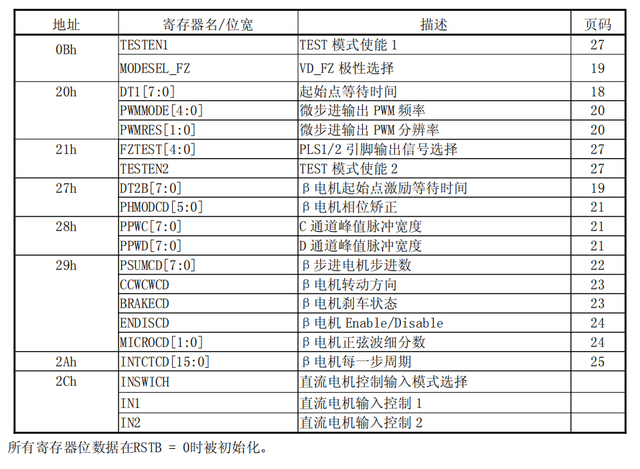
% ~& j7 D- g' D* Z9 r3 M% Q/ B9 ^5 K( X. G! ^. I' V- R7 J
步进电机细分步进驱动 模块框图 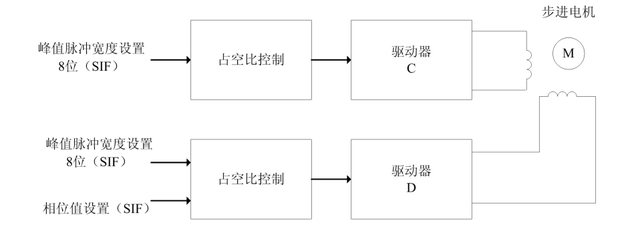 6 s" o& }, e' Y0 N 6 s" o& }, e' Y0 N
% \6 n# J+ [+ z# s, U% M
相关设置的建立时刻 建立时刻和相关时间如下所示 如果相关寄存器被刷新,则每一个 VD 周期来到时会实现一次设置的加载刷新。当同样的设置被执行超过 2 个 VD 脉冲时,没有必要在每个 VD 脉冲都写入寄存器数据。 DT1[7:0](起始点延时,地址 20h) 更新数据时间设置。在系统硬件复位后(引脚 RSTB:低→高),开始激励和驱动电机前(DT1结束)这段时间内,必须设置此项. 由于这个设置在每次 VD 脉冲来到时更新,没有必要一定在起始点延迟时内写入。 PWMMODE[4:0],PWMRES[1:0](微步进输出 PWM 波频率,地址 20h) 设置微步进输出 PWM 波频率。需要在开始激励和驱动电机前设置执行(DT1 结束) DT2B[7:0](起始点激励延时,地址 27h) 更新数据时间设置。复位后(引脚 RSTB:低→高),需要在开始激励和驱动电机前被设置执行(DT1 结束) PHMODCD[5:0](相位矫正,地址 27h) 通过矫正线圈 A 和 B 的相位差,驱动器产生的噪声会减少。合适的相位矫正必须依据于电机的旋转方向和速度,此设置需要随着旋转方向(CCWCWAB)或者旋转速度(INTCTABA)的变化而改变。 PPWC[7:0],PPWD[7:0](峰值脉冲宽度,地址 28h) 设置 PWM 最大占空比。设置需要在开始激励和驱动电机前被设置执行(DT1 结束) PSUMCD[7:0](步进电机步进数,地址 29h) 1 个 VD 的时间间隔内的电机的转动次数设置。每次 VD 脉冲输入时,电机转动所设置的次数。因此,设置次数为“0”是可以停止电机的转动。 当设置的转动次数总额超过了 1 个 VD 脉冲的时间,超出部分会被取消。 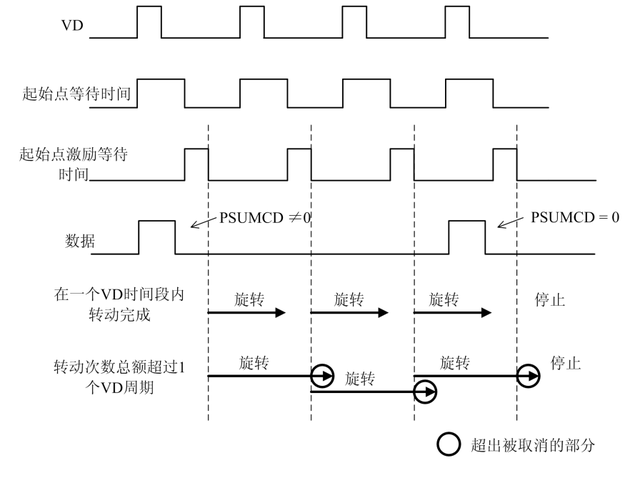
: @% S3 x3 Y6 F j: X% H# }
, N ]$ \& Y4 { ]# N0 ?/ iCCWCWCD(转动方向,地址 29h) 电机转动方向设置。只要在选择转动方向前设置即可。 BRAKECD(电机刹车设置,地址 29h) 刹车时设置电流为 0. 由于执行此设置时,很难得到电机的最终位置,所以此设置一般用于立 即停止电机。 ENDISCD(电机工作 Enable/Disable,地址 29h) 设置电机工作使能。当设置为不使能时,电机引脚输出高阻态,电机正在转动时不要设置成 disable。 MICROCD[1:0](正弦波分频数,地址 29h) 设置正弦波的分频数。这个设置不改变转动次数和转动速度。 只有当转速达不到要求时才需要设置此项。复位后(引脚 RSTB:低→高),设置有效。 INTCTCD[15:0](脉冲周期,地址 2Ah) 脉冲周期设置。转动速度决定于这个设置。 重置/保护电路 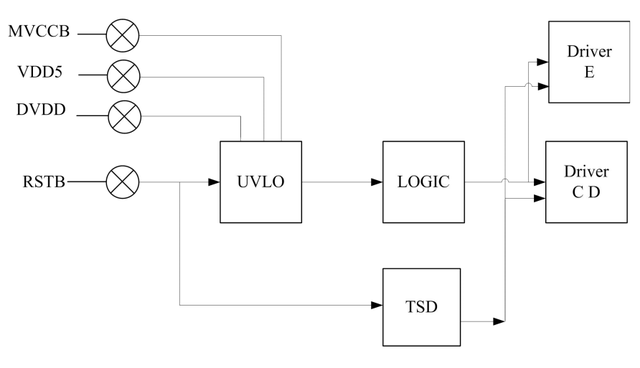 8 V8 _2 `7 f% ~3 N8 ~' D$ M: } x1 ` 8 V8 _2 `7 f% ~3 N8 ~' D$ M: } x1 `
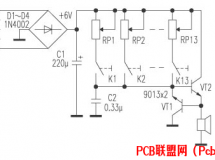
8 [+ a1 k+ P9 j- d8 G典型应用图 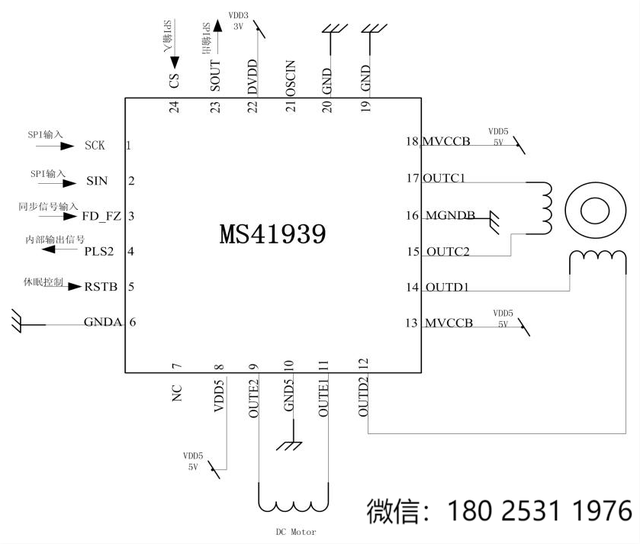 . ~2 q, K, m! P3 ` . ~2 q, K, m! P3 `
6 |; {6 G: P2 S. P3 T t详细资料可以联系我或者瑞盟官网下载 9 O4 ^5 A6 T# r& K
| 

















 窥视卡
窥视卡

 置顶卡
置顶卡 变色卡
变色卡