|
|
#申请原创# @21小跑堂
![[STM32] 无法控制输出脉冲?试试双定时器的强强联手-1.jpg](data/attachment/forum/202207/16/082653hlg9tjc7828lz87c.jpg "[STM32] 无法控制输出脉冲?试试双定时器的强强联手-1.jpg")
如图,最近在逛论坛,看到几个帖子都在咨询如何控制单片机输出固定的数量的PWM脉冲,用于控制电机的转停,刚好前两天本人也需要该功能做测试,我是输出PWM给伺服电机驱动器,驱动器以位置模式工作,收到脉冲就控制电机转动,如果需要精确控制电机转过的角度,就需要给驱动器输入固定数量的脉冲。于是我便用STM32F031的双定时器实现了该功能,下文便详细描述。
我在进行代码编译之前也在网络上搜索过相应的方法,总结起来一共五个方法:
1、单脉冲法,需要一个脉冲中断一次,中断次数多,影响效率
2、一个定时器输出PWM,另一定时器使用输入捕获进行中断计数,与方法1一样,同样需要频繁的中断
3、用主从定时器门控方式,比较繁琐
4、用一个定时器(从)作为另一个定时器(主)的外部时钟触发源
5、高级定时器T1、T8的重复计数方式,RCR计数中断,看手册好像这种方式最简单,能满足一部分人要求,缺点是寄存器只有8位,最多实现255个脉冲计数输出。
我在最初时使用了第2和方法,该方法对于我来说你叫简单,后来在写这篇文章时选择了第4个方法,总结起来还是4比较靠谱,但是这里的第2方法也描述一下,便于大家选择。
方法2:
因为条件限制,干脆说为了省事,我在原来用于其他功能的板子上进行测试,因为只开放了PB3和PB4,所以这里只好用TIM2和TIM3进行测试。
TIM2用于产生PWM脉冲输出,在输出给驱动器的同时将该脉冲也接到PB4,也就是TIM3的输入口,这样TIM3也能接收到TIM2发出的脉冲,TIM3只需要配置为输入捕获,并开启中断,便可以在每次脉冲到来进入中断,在TIM3的中断中去计数,达到需要的脉冲数便关闭TIM2便可。
首先依旧是初始化端口:
先贴一下time.h文件:
/* 定义防止递归包含 ----------------------------------------------------------*/
#ifndef _TIMER_H
#define _TIMER_H
/* 包含的头文件 --------------------------------------------------------------*/
#include "stm32f0xx.h"
/* 宏定义 --------------------------------------------------------------------*/
#define TIM6_COUNTER_CLOCK 1000000 //计数时钟(1M次/秒)
//预分频值
#define TIM6_PRESCALER_VALUE (SystemcoreClock/TIM6_COUNTER_CLOCK - 1)
#define TIM6_PERIOD_TIMING (10 - 1) //定时周期(相对于计数时钟:1周期 = 1计数时钟)
#define TIM2_COUNTER_CLOCK 24000000 //计数时钟(24M次/秒)
//预分频值
#define TIM2_PRESCALER_VALUE (SystemCoreClock/TIM2_COUNTER_CLOCK - 1)
/* 函数申明 ------------------------------------------------------------------*/
void Systick_Init(void);
void Delay_ms(__IO uint32_t nTime);
void TimingDelay_Decrement(void);
void Delay(uint32_t temp);
void delay_us(uint32_t nus);
void delay_init();
void TIMER_Initializes(void);
void TIMDelay_N10us(uint16_t Times);
void TIMDelay_Nms(uint16_t Times);
void TIMDelay_Ns(uint16_t Times);
void TIMER_PWM_GPIO_Configuration(void);
void TIM2_CH2_PWM(uint32_t Freq, uint16_t Dutycycle);
void TIMER_IC_Configuration(void);
#endif /* _TIMER_H */
复制代码
因为我的时钟初始化是单独定义的,所以这里未进行时钟的初始化,在参考的我的代码时需注意:
void TIMER_PWM_GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //TIM2引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //高速输出
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推完输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource3, GPIO_AF_2); //复用配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; //TIM3引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //高速输出
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推完输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //无上下拉(浮空)
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource4, GPIO_AF_1);
}
复制代码
配置定时器2,TIM2作为PWM的脉冲输出:
/************************************************
函数名称 : TIM2_CH2_PWM
功 能 : 定时器2通道2输出PWM
参 数 : Freq -------- 频率
Dutycycle --- 占空比
返 回 值 : 无
作 者 : 呐咯密密
*************************************************/
void TIM2_CH2_PWM(uint32_t Freq, uint16_t Dutycycle)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
uint16_t tim2_period;
uint16_t tim2_pulse;
tim2_period = (uint16_t)(TIM2_COUNTER_CLOCK/Freq - 1); //计算出计数周期(决定输出的频率)
tim2_pulse = (tim2_period + 1)*Dutycycle / 100; //计算出脉宽值(决定PWM占空比)
/* TIM2时基单元配置 */
TIM_TimeBaseStructure.TIM_Prescaler = TIM2_PRESCALER_VALUE; //预分频值
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseStructure.TIM_Period = tim2_period; //定时周期(自动从装载寄存器ARR的值)
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频因子
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
/* TIM2通道2:PWM1模式配置 */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出PWM1模式
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //使能输出
TIM_OCInitStructure.TIM_Pulse = tim2_pulse; //脉宽值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性
TIM_OC2Init(TIM2, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM2, ENABLE);
TIM_Cmd(TIM2, ENABLE); //初始化PWM。
}
复制代码
配置定时器3,作为捕获输入:
void TIMER_IC_Configuration(void)
{
TIM_ICInitTypeDef TIM_ICInitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Prescaler = 1 - 1; //1分频(与捕获分频相同)
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseStructure.TIM_Period = 0xFFFFFFFF; //定时周期(自动从装载寄存器ARR的值)
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频因子
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //通道1
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Falling; //捕获极性
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //捕获选择
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //捕获分频
TIM_ICInitStructure.TIM_ICFilter = 0; //捕获滤波
TIM_ICInit(TIM3, &TIM_ICInitStructure);
TIM3->SR = (uint16_t)~TIM_IT_CC1; //清除中断标志
TIM_Cmd(TIM3, ENABLE); //使能TIM3
TIM_ITConfig(TIM3, TIM_IT_CC1, ENABLE); //使能中断
}
复制代码
关于定时器的通道要根据手册定义来确定,我的只适配我的硬件。
这里需要着重说一下预分频TIM_Prescaler的值和捕获分频TIM_ICPrescaler的值要对应,在上面的代码中这两个值均为1,效果就是每来一个脉冲就会进一次中断。我们只需在中断里进行计数,想要几个脉冲就进中断几次,达到需要的脉冲数就关闭TIM2。如下所示:
配置中断:
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //IRQ通道:定时器2
NVIC_InitStructure.NVIC_IRQChannelPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
复制代码void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3, TIM_IT_CC1) != RESET)
{
TIM_ClearITPendingBit(TIM3,TIM_IT_CC1);//先清空中断标志位,以备下次使用。
capture++;
if(capture==16)
{
/*每16个脉冲转动电机一次*/
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Disable);
TIM_ARRPreloadConfig(TIM2, DISABLE);
TIM_Cmd(TIM2, DISABLE);
TIM_Cmd(TIM3, DISABLE); //失能TIM2
TIM_ITConfig(TIM3, TIM_IT_CC1, DISABLE); //失能中断
capture=0;
delay_us(5000);
TIM_Cmd(TIM3, ENABLE); //失能TIM2
TIM_ITConfig(TIM3, TIM_IT_CC1, ENABLE); //失能中断
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM2, ENABLE);
TIM_Cmd(TIM2, ENABLE);
}
}
}
/*
复制代码
在TIM3的中断函数中,我们定义一个变量capture,每次进入中断该值会加一,进入16次中断,也就是有16个脉冲输入就会满足条件进入if()函数,关闭TIM2和TIM3,延时5000us后再打开这两个定时器,如此循环。可从示波器看现象:
![[STM32] 无法控制输出脉冲?试试双定时器的强强联手-2.jpg](data/attachment/forum/202207/16/082654m4njkyvk1mmks4oz.jpg "[STM32] 无法控制输出脉冲?试试双定时器的强强联手-2.jpg")
![[STM32] 无法控制输出脉冲?试试双定时器的强强联手-3.jpg](data/attachment/forum/202207/16/082654y4etwc2w9m9xggww.jpg "[STM32] 无法控制输出脉冲?试试双定时器的强强联手-3.jpg")
现在我们已经完成了对TIM2的输出固定个数脉冲的试验,但是这种方式每个脉冲都进一次中断太麻烦,于是可以修改预分频TIM_Prescaler的值为8-1,和捕获分频TIM_ICPrescaler的值为TIM_ICPSC_DIV8,便可8个脉冲进一次中断。
![[STM32] 无法控制输出脉冲?试试双定时器的强强联手-4.jpg](data/attachment/forum/202207/16/082655p8b5lwl8nll3llql.jpg "[STM32] 无法控制输出脉冲?试试双定时器的强强联手-4.jpg")
此时也将中断函数里的判断条件改为1,进一次中断便会关闭定时器,我们接上示波器看看现象:
![[STM32] 无法控制输出脉冲?试试双定时器的强强联手-5.jpg](data/attachment/forum/202207/16/082655awkub999wzw83b1k.jpg "[STM32] 无法控制输出脉冲?试试双定时器的强强联手-5.jpg")
通过示波器我们可以看到,虽然只进了一次中断,但是我们却输出8个脉冲,以此可减少进入中断的次数。至此,通过TIM3的输入捕获控制PWM脉冲数的试验就完成了。
方法4:
方法4是利用主从定时器进行脉宽调制,不占用主时钟,在代码时间要求苛刻和多电机控制时非常实用,可以精准控制。
GPIO的初始化和上文保持不变,仅改变TIM的配置:
TIM2设置为主模式
/***********************TIM2初始化函数*************************
****参数:****************************************************/
/******u32 Cycle用于设定计数频率(计算公式:Cycle=1Mhz/目标频率)**
****返回值:**************************************************/
/******无*****************************************************/
void TIM2_config(uint32_t Cycle)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_TimeBaseStructure.TIM_Period = Cycle-1; //使用Cycle来控制频率(f=48/(47+1)/Cycle) 当Cycle为100时脉冲频率为10KHZ
TIM_TimeBaseStructure.TIM_Prescaler =47; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS= Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0; //重复计数,一定要=0!!!
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = Cycle/2-1; //设置待装入捕获寄存器的脉冲值(占空比:默认50%,这可也可以调节如果需要的话将它作为一个参数传入即可)
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性
TIM_OC2Init(TIM2, &TIM_OCInitStructure); //使能通道2
TIM_SelectMasterSlaveMode(TIM2, TIM_MasterSlaveMode_Enable); //设置为主从模式
TIM_SelectOutputTrigger(TIM2, TIM_TRGOSource_Update); //选择定时器2的触发方式(使用更新事件作为触发输出)
TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable); //使能通道2预装载寄存器
TIM_ARRPreloadConfig(TIM2, ENABLE); //使能TIM2在ARR上的预装载寄存器
}
复制代码
TIM3设置为从模式:
/***********************TIM3初始化函数*************************/
/****参数:****************************************************/
/******u32 PulseNum用于设定脉冲数量****************************/
/****返回值:*************************************************/
/******无*****************************************************/
void TIM3_config(uint32_t PulseNum)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
TIM_TimeBaseStructure.TIM_Period = PulseNum-1; //设置自动重装载周期值
TIM_TimeBaseStructure.TIM_Prescaler =0;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_SelectInputTrigger(TIM3, TIM_TS_ITR1);
TIM_SelectSlaveMode(TIM3,TIM_SlaveMode_External1 );// 等同 TIM3->SMCR|=0x07 //设置从模式寄存器
TIM_ITConfig(TIM3,TIM_IT_Update,DISABLE);
}
复制代码
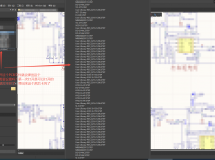
这里的TIM_SelectInputTrigger(TIM3, TIM_TS_ITR1);是设置为内部触发,参数由手册进行获取:
![[STM32] 无法控制输出脉冲?试试双定时器的强强联手-6.jpg](data/attachment/forum/202207/16/082655tq4kyygo4i6rdp2i.jpg "[STM32] 无法控制输出脉冲?试试双定时器的强强联手-6.jpg")
/************************脉冲输出函数**************************/
/****参数:****************************************************/
/******u32 Cycle用于设定计数频率(计算公式:Cycle=1Mhz/目标频率)/
/******u32 PulseNum用于设定输出脉冲的数量(单位:个)************/
/****返回值:**************************************************/
/******无*****************************************************/
void Pulse_output(uint32_t Cycle,uint32_t PulseNum)
{
TIM3_config(PulseNum); //设置脉冲数量
TIM_Cmd(TIM3, ENABLE); //使能TIM3(从定时器)
TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除中断标志位
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE); //使能更新中断
TIM2_config(Cycle); //使能定时器2(主定时器)
TIM_Cmd(TIM2, ENABLE); //使能定时器2
// TIM_CtrlPWMOutputs(TIM2, ENABLE); //高级定时器一定要加上,主输出使能
}
复制代码void TIM3_IRQHandler(void)
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //TIM_IT_Update
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update); // 清除中断标志位
TIM_CtrlPWMOutputs(TIM2, DISABLE); //主输出使能
TIM_Cmd(TIM2, DISABLE); //关闭定时器
TIM_Cmd(TIM3, DISABLE); //关闭定时器
TIM_ITConfig(TIM3, TIM_IT_Update, DISABLE); //关闭TIM2更新中断
}
}
复制代码
当TIM的CNT寄存器的值到达设定的Update值会触发更新中断,此时设定的脉冲数已输出完毕,关闭TIM2和TIM3.
主函数:
![[STM32] 无法控制输出脉冲?试试双定时器的强强联手-7.jpg](data/attachment/forum/202207/16/082656rheelmxe2mj0hwj4.jpg "[STM32] 无法控制输出脉冲?试试双定时器的强强联手-7.jpg")
![[STM32] 无法控制输出脉冲?试试双定时器的强强联手-8.jpg](data/attachment/forum/202207/16/082657o2mv7uviusss92lm.jpg "[STM32] 无法控制输出脉冲?试试双定时器的强强联手-8.jpg")
该代码本人均已调通,原理部分过于繁杂,这里以本人能力可能无法解释的清除,诸位可参考手册或网络获取相关讲解。
原文:https://bbs.21ic.com/icview-3127662-1-1.html |
|


















 窥视卡
窥视卡

 置顶卡
置顶卡 变色卡
变色卡