|
MS35009描述 MS35009 是一款镜头驱动系统芯片,由于它的微步进特性,可以满足复杂,精致,低噪音的镜头驱动系统。微步进驱动功能控制模块集成在芯片中,可以极大降低 CPU的功耗。另外,芯片集成了直流电机与音圈电机马达驱动,可以满足不同的镜头系统。 主要特点 内置 7 个通道的驱动模块,H 桥最大驱动电流±0.8A SPI 串行总线通信控制电机 负载电压范围:2.7V--5.5V 封装图  ; A8 i- q9 M6 i* } ; A8 i- q9 M6 i* }
6 r9 Y6 K2 Y) k8 j管脚图  1 V" W* U. J, ?% y0 V# J 1 V" W* U. J, ?% y0 V# J
8 l E0 c$ O: h. k* X @
管脚说明图 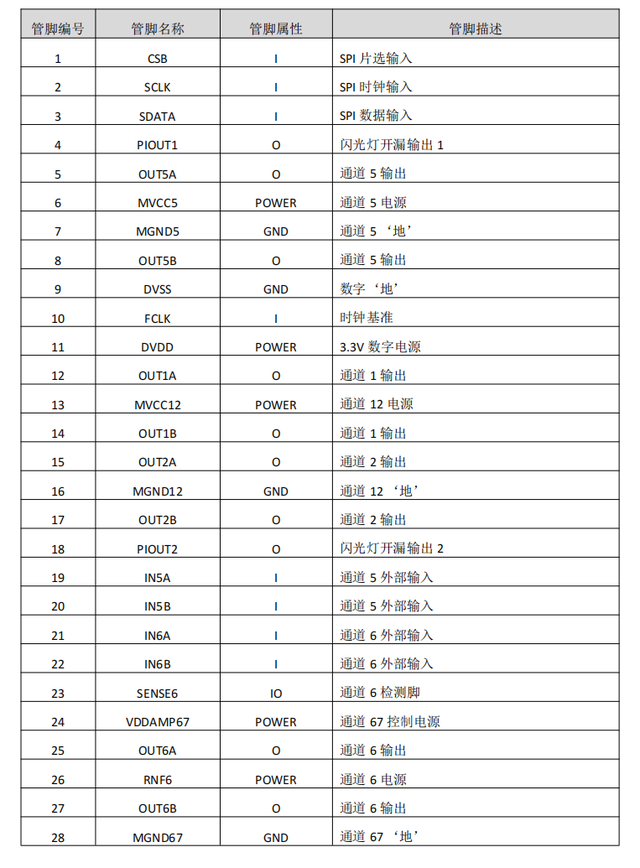 . [" U& R# b& h% g! m2 }$ P4 l . [" U& R# b& h% g! m2 }$ P4 l
/ N4 U' R: ~6 v, M: \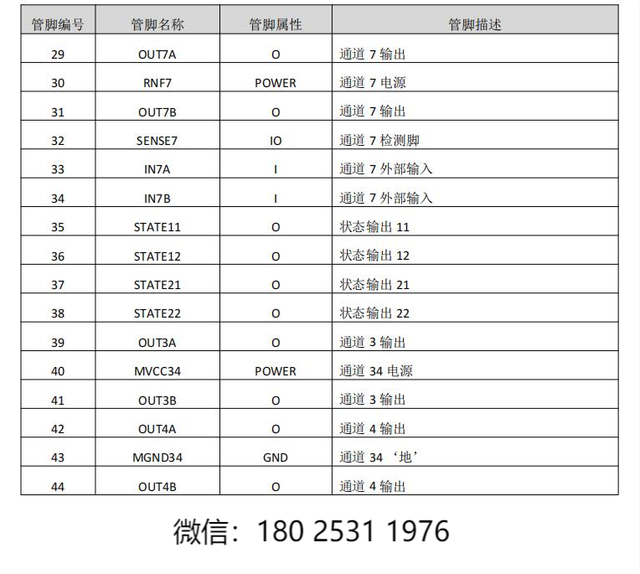
8 s4 l2 z3 |- b1 _. }, @6 L# N1 }7 H: z5 ?& D
内部框图 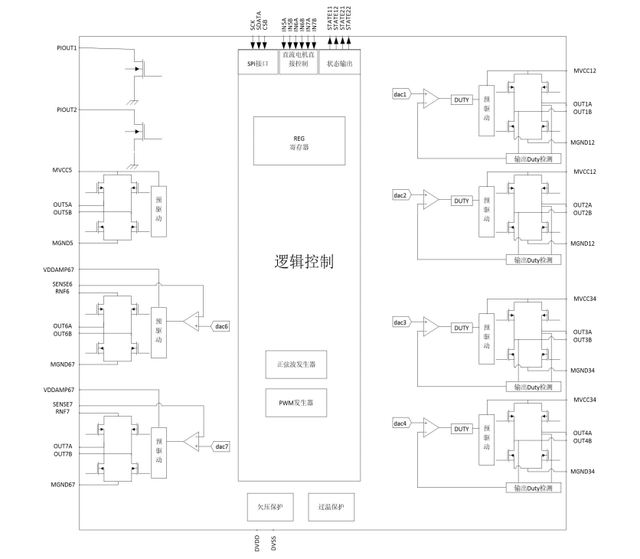 M! ]. T1 i$ L7 l M! ]. T1 i$ L7 l
0 \" I& a' k! S电气参数 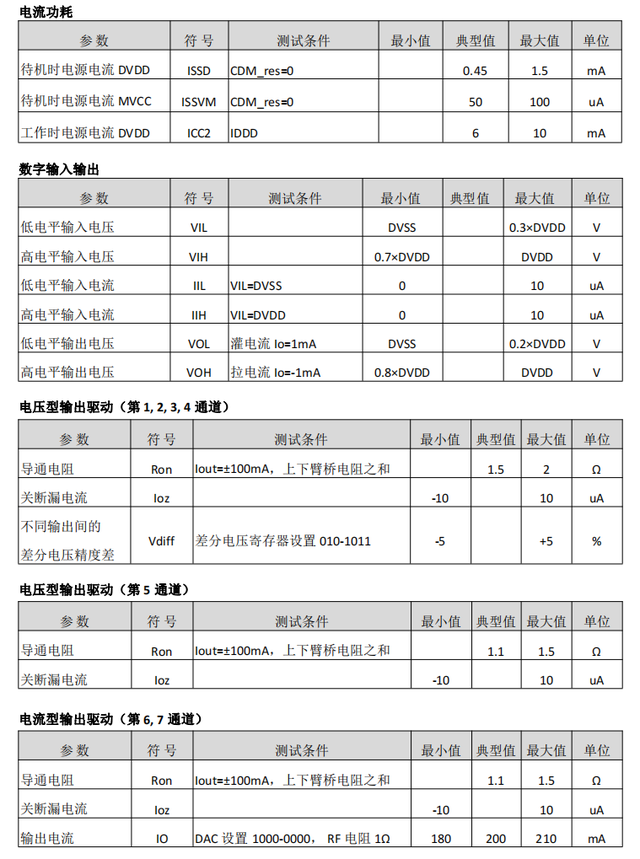
: x9 R& ~ e+ l* t
% g) ^+ w6 P& T. v. X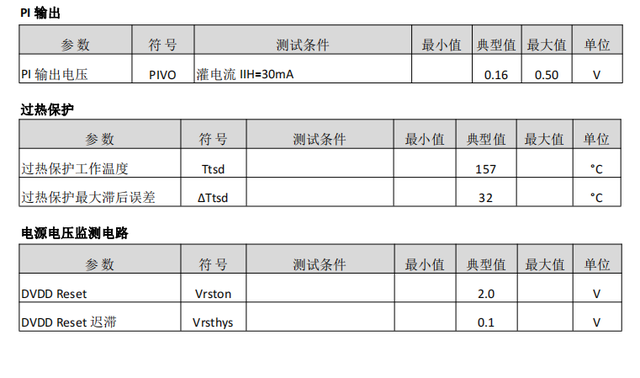
- y( ]8 T& K6 c6 m
9 Z: G v) |6 ~9 g4 M$ j5 k功能描述 1. 系统模块介绍 步进电机驱动(第 1 到 4 通道) 内置细分的 PWM 驱动模式,最多可以驱动两个步进电机。 内置电压反馈的类似 D 类功放的驱动模式。 第 3,4 通道可以做为独立的直流电机驱动或者音圈电机驱动.步进电机通过设置相关的寄存器进行行为控制。可以选择 1024 的微细分模式,1-2 相位,2 相位模式。另外系统带指令缓存器,当电机在运转当前指令时,设置后面的指令,从而电机可以持续运转。 电机的运行状态指示 ACT,与电机转动位置信息 MO,可以通过 STATExx 脚读出。 控制框图如下: 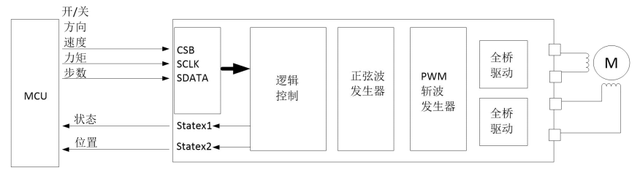 , C7 M6 M- u" D0 i , C7 M6 M- u" D0 i
l9 z+ E5 a) ?5 v! a& N/ u直流电机驱动(第 5 通道) 直流电机驱动是电压型的 PWM 斩波控制。 此电机驱动既可以通过 SPI 设置寄存器设置,同时由于外置了直接控制管脚,也可以通过外部的管脚控制,又或者可以两者结合的混合控制。 SPI 模式控制: 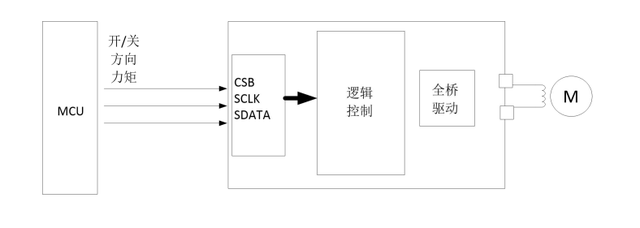
2 E0 r* W$ A0 v- t: G
& e8 Q/ [* a v9 C/ F6 e* O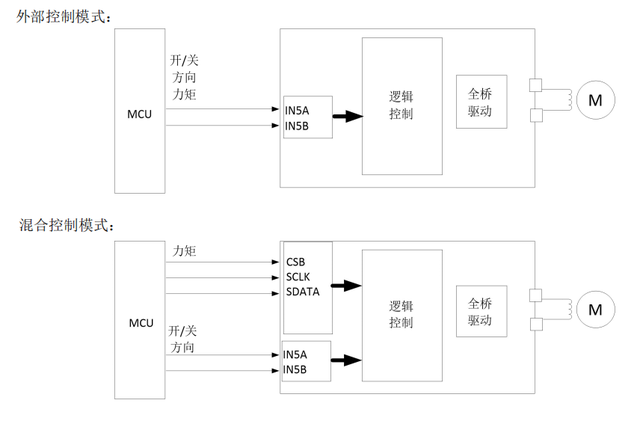 2 f- b) W8 p- h% X 2 f- b) W8 p- h% X
5 L; w( i' Y! C: H( ^$ Y& l0 T电流型直流驱动(第 6,7 通道) 第 6,7 通道为电流型的输出驱动,内置恒电流模式的驱动器。 RNF 脚的电压与 RNF 脚的电阻关系,决定了电机的输出电流,内部集成了高精度的比较器来是电流稳定。 如果 RNF 脚存在寄生的电阻,将会影响电流的精度,需要特别注意。 电流型的驱动可以通过 SPI 来设置寄存器的方式控制,也可以与外部的输入脚混合控制。 SPI 控制模式:通过 SPI 设置电流大小,状态和方向。 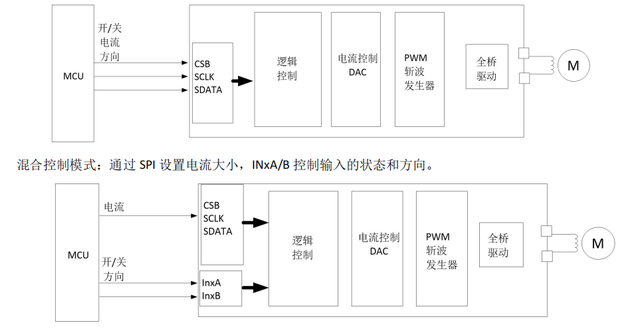
9 p8 m2 S( `) @3 \8 A0 V1 b; L. ?$ l5 q% S8 E3 g
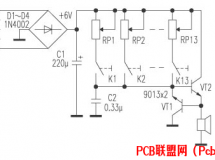
系统应用 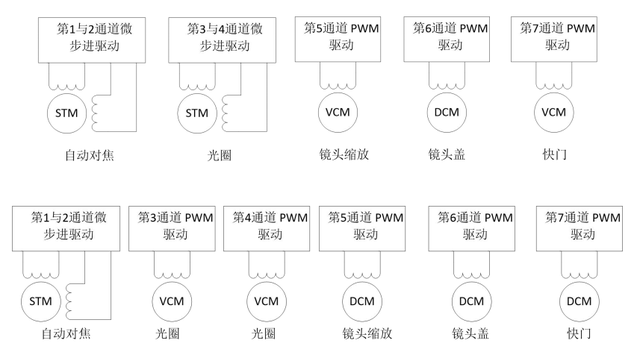 3 p. ?" F d: H8 ]# o. g8 _ 3 p. ?" F d: H8 ]# o. g8 _
% I& k6 t2 E; j2 `3 [; b+ C% z3. SPI 接口 3 线串行接口 控制命令由 16 位串行数据构成,从 CSB、SCLK 和 SDATA 引脚进入(高位先入)。最高 4 位为地址位,其余 12 位为数据位。 每 1 位由 SDATA 引脚进入的数据,在每个 SCLK 的上升沿被读取。 数据在 CSB 为低电平时写入有效,但不同寄存器的数据录入时刻有所区别(详见注 4,5)。  - c( ~" }) Z4 X - c( ~" }) Z4 X
& o$ _# C1 E @3 X寄存器 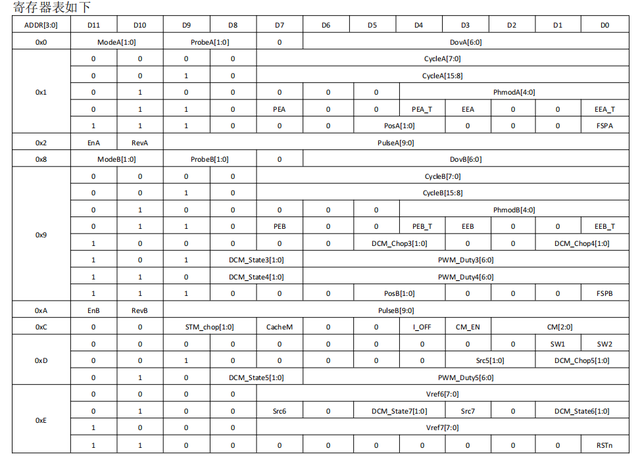 $ V0 F# K) \* y+ M $ V0 F# K) \* y+ M
+ z! H0 |" e+ C( X. k/ S注: 1. 寄存器表中,xxA 与 xxB 分别对应于 Ach 和 Bch。 2.Ach 被定义为由 1ch 和 2ch 驱动输出,Bch 被定义为由 3ch 和 4ch 输出。 3.在复位(resetting)之后(包括上电复位和通过 CMD_RS 寄存器复位),所有寄存器都被置为初始态。 4.对于 Mode, DOV, Cycle, En 和 Rev 寄存器,写入的数据在 Pulse 寄存器写入之前等待,在 Pulse 寄存器数据写入完成后的 CSB 信号上升沿被应用。且 Mode, DOV, Cycle, En 和 Rev 寄存器有缓存寄存器,除这些之外的寄存器则没有。 5. 对于 Pos, FSP, DCM_Chop, DCM_State 和 PWM_duty 寄存器,写入的数据在数据写入完成后的 CSB 信号上升沿被应用,除这些之外的寄存器的写入数据在第 16 个 SCLK 信号上升沿被应用。 典型应用图 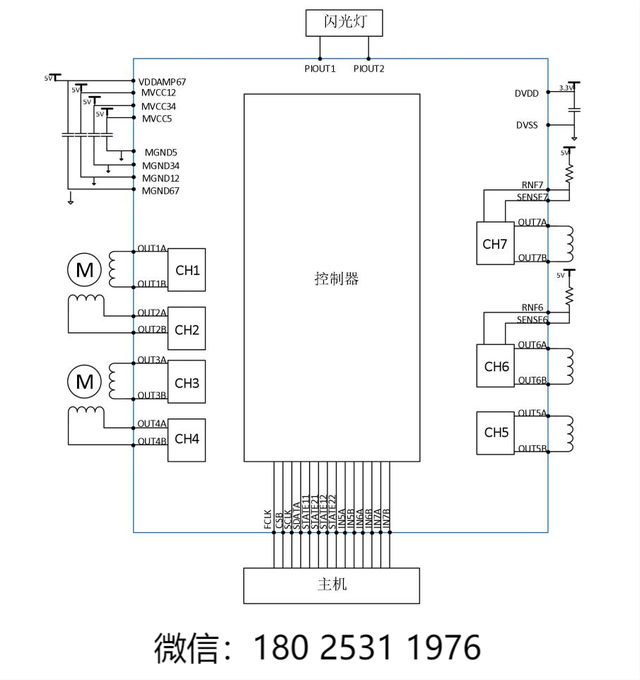
% c, ~2 S B, x$ ~( K3 ?5 \6 l7 z' B" b" d/ X4 o
| 

















 窥视卡
窥视卡

 置顶卡
置顶卡 变色卡
变色卡