上一篇写了几个简单的打拍同步器,这一篇看下带有使能信号的多比特同步结构——DMUX同步器。
DMUX的典型结构是这样的:
其遵循的原则就是,数据不同步只对控制信号同步,这点其实和异步fifo里的思路一样,只不过异步fifo中的控制信号是多比特的格雷码,而这个场景下的控制信号是in_vld。继续观察结构可以发现,DMUX是将控制信号同步之后,在目的时钟域获取了控制信号的上升沿,以上升沿为使能信号采样数据。因此使用这个结构需要满足若干的要求:
1.数据和使能信号在源时钟域为同步到来的信号;
2.使能信号需要维持一段时间(目的时钟两拍),确保同步器能够稳定采样;
3.在目的时钟域对数据完成采样前,数据信号不能跳变;
如果不满足以上的要求,那么就可能造成数据漏同步、错同步等问题。接下来,完成代码,接口改了下名字和其他模块统一:
module async_nbit_dmux #(
parameter DL = 2,
parameter WD = 1,
parameter FF = 1
)( /*AUTOARG*/
// Outputs
o_data, o_en,
// Inputs
i_clk, i_rst_n, i_data, i_en, o_clk, o_rst_n
);
// ----------------------------------------------------------------
// Interface declare
// ----------------------------------------------------------------
input i_clk;
input i_rst_n;
input [WD -1:0]i_data;
input i_en;
input o_clk;
input o_rst_n;
output[WD -1:0]o_data;
output o_en;入口处仍旧可以选择是否需要打拍后再进行同步操作:
// ----------------------------------------------------------------
// i_data dff
// ----------------------------------------------------------------
wire [WD -1:0]i_data_in;
wire i_en_in;
generate
if(FF == 0)begin: NO_IN_DFF
assign i_data_in = i_data;
assign i_en_in = i_en;
end //if(FF == 0)begin: NO_IN_DFF
else begin: IN_DFF
reg [WD -1:0]i_data_ff;
reg i_en_ff;
always @(posedge i_clk or negedge i_rst_n) begin
if(!i_rst_n)begin
i_data_ff 而后将控制信号同步到目的时钟域,并捕捉其上升沿:
// ----------------------------------------------------------------
// i_en_in async
// ----------------------------------------------------------------
wire i_en_sync;
reg i_en_sync_ff;
wire i_en_sync_pulse;
reg i_en_sync_pulse_ff;
async_1bit_delay #(.DL(DL), .FF(0))
u_i_en_sync(
.i_clk (i_clk),
.i_rst_n (i_rst_n),
.i_data (i_en_in),
.o_clk (o_clk),
.o_rst_n (o_rst_n),
.o_data (i_en_sync)
);
always @(posedge o_clk or negedge o_rst_n) begin
if(!o_rst_n)
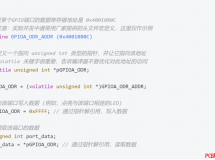
i_en_sync_ff 通过目的上升沿对数据进行采样,并输出结果:
// ----------------------------------------------------------------
// i_data_in sample
// ----------------------------------------------------------------
reg [WD -1:0]i_data_sync;
always @(posedge o_clk or negedge o_rst_n) begin
if(!o_rst_n)
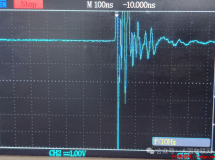
i_data_sync 最后是仿真波形:
系列文章入口——
| 【芯片设计】SoC 101(一):绪论 | | 【芯片设计】FIFO漫谈(零)从无处不在的FIFO开始说起 | | 【芯片设计】计算机体系结构(一)虚拟内存 | 【芯片设计】深入理解AMBA总线(零)绪论
| | 【芯片设计】握手协议的介绍与时序说明 | | 【芯片设计】复位那些小事 —— 复位消抖 | | 【芯片设计】快速入门数字芯片设计(一)Introduction | 【芯片验证】UVM源码计划(零)下定决心读源码前的自测环节
| 【芯片设计】异步电路碎碎念(一) 到底什么是异步电路
| 【芯片设计】从RTL到GDS(一):Introduction
|
其他文章链接——
| 【芯片验证】sva_assertion: 15道助力飞升的断言练习 | | 【芯片验证】可能是RTL定向验证的巅峰之作 | | 【芯片验证】RTL仿真中X态行为的传播 —— 从xprop说起 | | 【芯片验证】年轻人的第一个systemVerilog验证环境全工程与解析 |
【芯片设计】verilog中有符号数和无符号数的本质探究
| | 【芯片设计】论RTL中always语法的消失术 | | 【芯片设计】代码即注释,注释即代码 | | 【芯片设计】700行代码的risc处理器你确实不能要求太多了 |
| 入职芯片开发部门后,每天摸鱼之外的时间我们要做些什么呢 | | 如何计算系统的outstanding 和 burst length? | | 芯片搬砖日常·逼死强迫症的关键词不对齐事件 | | 熟人社会里,一群没有社会价值的局外人 |
|

















 置顶卡
置顶卡 变色卡
变色卡

![电源电路中的电磁兼容设计[20250414]](data/attachment/block/24/24fb38c4670aecc3529d4399e5bb4889.jpg)













