一、无刷电机调速控制是电机控制的基本要求。3 f& L7 Q' v" l( C) m \- \
9 W. O1 P4 S0 w, a7 z z
常见的控制方式无外乎几种:电位器(AD)调速、PWM调速、分段速度调速(或给定速度调速)。1 q, ]1 e0 i. [% n* a
: e8 G( e# |1 t
kwvp3zdz0ei64066782124.png
 * m* z( W' i( K, Y' z
* m* z( W' i( K, Y' z
我的一本书,比较经典用心,推荐学习文末扫码进群获取
! T* l. g5 [3 ]& U; {+ L* p最近在调高速无刷电机无级调速时遇到一些问题,结合自己近20年的电机驱动开发经验,分享一些问题和心得。
9 ]& _# L3 [, L Q我最近开发的这个应用,MCU选用了CW32L010,采用AD比较过零点,无感控制BLDC方式,AD转换速率最快为2M。( Q$ U) { S, F! c0 b6 E
即每一个数据点采样时间为0.5US。一个PWM周期按5路AD转换需求来算,一个周期内,AD转换时间约为2.5US。" }9 p* m! t! s4 E o& l1 ]
二、当使用AD电位器调速时可能存在的问题:: Y* s4 c# ~- _; S# \! @, ]+ W
使用AD电位器调速时,调速精度最高计算方法:100000/4096=24.4RPM(以CW32L010为12位AD计算)。
) \& W: D4 q% G& c" {/ p即每个AD转换精度位,可调转速精度最高为24.4RPM。若存在2个AD转换位误差时,转速变化将为50RPM左右。
# L& M# q; F6 V+ _; Y实际控制中,由于硬件上地线干扰等引起的AD输入的干扰,会引起更多不确定的AD转换位误差,所以在没有做软件AD滤波的时候,无极调速很难将速度控制在一个理想值。
5 K: C- [3 t1 T& |$ v/ Q因此,在使用电位器无极调速时,发生ADC采集到的给定的电压值存在浮动(或开环占空比浮动),容易引起电机输出速度的浮动。
; l- t$ c/ t# P2 |, `+ j$ z4 c反映在高转速电机上,如暴力风扇、高速风机、可以听到电机因为转速不恒定而产生不均匀的噪音。就像末日刮风胡乱吹一样。
|' }. m" |8 x7 J8 }6 F/ W几乎所有涉及到高速电机的产品,很少有用无极调速的方式,更多的是使用分段给定速度的方法,也就是换挡调速。
. z% Y5 R. t$ Y, h( q6 Y但有时客户有应用需求,也有简单的方法可以解决,也就是在AD转换上加一道滤波算法,将AD采集的干扰滤除。
) T9 E: X. G# q8 n这样会使调速精度降低,从而略微影响电机调速时转速变化的平滑度。
# Q7 x3 N y# e1 e+ D- _三、当使用PWM调速时可能存在的问题:9 V, V& Q, G6 E, O
教科书的PWM调速,是让MCU对PWM进行输入捕获,但在实际使用中仍会有很多问题。- g2 Y, u" E/ F/ C( O& b3 j: n e% X
比如这个PWM占空比的识别,存在非常占用中断资源和定时器时钟资源的问题,这给MCU的运算处理增加了很多负担,PWM输入频率越低,MCU负担越轻。
- n5 y' T1 D9 j5 c2 q同时,外部的干扰有时会导致定时器精度受限,也会出现无法准确识别100%占空比的情况(这种可以将99%占空比认定为100%)3 W( O H) ^. D$ q# v
在很多普遍的应用中,都是在硬件的PWM输入处增加一个RC滤波器,将PWM值转换成AD模拟值,有时为了提升转换的线性度,也会使用运放设计一个跟随器电路,增大RC输入的内阻。此时PWM输入频率越高越好。5 A$ h6 V& @7 U* Y
但这种方式也有点小问题,在不标定的情况下,无法准确确定PWM转AD的线性的对应关系。6 Y( f4 H) R4 V3 O) ` Q
如果回到PWM输入捕获,在使用PWM频率为10K时,我们不使用输入捕获功能,而是改为IO边沿中断,减轻MCU运算负担,PWM引起的IO中断频率将为20K(需要捕获2次边沿中断),即50US。
1 z: J3 C' q8 A* f此时,电机驱动器相当于一个开环执行器,在一些控制应用中,可以通过外部增加如压力、温度、速度等闭环控制。7 w" n* |/ k! R/ I+ X
四、使用分段速度给定可能存在的问题:
: Q# d8 d o: D6 H2 v1 l分段速度最易理解。在这里指不做无级调速,固定几个速度值,或三档或五档或十档,进行切换调整。该方法可以通过按键切换速度档位,或以通讯控制给定确定不变的速度值。' ^8 \. C4 y+ C+ I
很多新人工程师想当然的去做时,却会发现在这种方式下,由于速度调整变化,在不同档位之间切换时会有不连续的感觉。
* j$ o5 X* R; c% ?以风机、泵类驱动最为明显,也以降档(降速)控制最为明显,只需要平缓降(升)速即可解决。
7 ~+ p) z$ K; W7 L, V1 g/ Q不合理的调速策略,可能会带来产品噪音及运行稳定性的问题,虽然调速是电机控制的基本内容,但在产品及工程应用时,需要考虑很多细节因素。+ t$ e( z# o0 D4 ?, s. T. F$ r; {7 N
而对于很多经验不足的工程师,在排查开发问题时,往往不会关注到他们的调速策略是否合理,导致项目无法顺利完成。
2 S% o& q* ^: ]% T以上都是结合自己的开发经验浅谈一下,欢迎批评建议和讨论。$ J& _( k+ m& r$ B2 s- Q$ ]
五、写在最后:
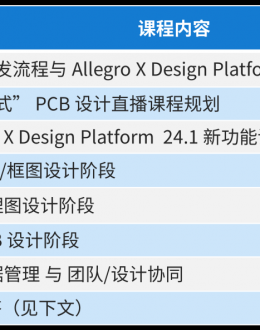
8 T( w$ r% l# Q2 L; P: ~电机控制应用是一个综合性很强的技术,如果您对此感兴趣,可以参加CW32生态社区举办的免费的电机控制应用专题培训直播,
& @ U/ C6 [3 t2 a9 M; k5 w9 A6 e( X' Y0 ~我也会在直播间给大家% b! S7 x6 r, |) [. z. x0 d2 {: l
分享干货知识~解答开发疑虑~各种奖品福利~
' g( i( ?( |/ g$ Z; D7 ?& }" {记得扫码报名,进群领取电机控制资料!9 D/ U0 f* o6 n' i
! ?5 Z/ R; a& h6 v: \
vshciehbuvp64066782224.png
 1 I7 q9 ]3 u* S( m I- `, C0 K" G
1 I7 q9 ]3 u* S( m I- `, C0 K" G
0 C2 z& ~; S* G# f- J9 ]
首场培训直播时间为12月6号周五晚8点
- O: g- p" |7 t. z4 x; r$ ](第二场直播时间报名后烦请耐心等候公告) | 





















 窥视卡
窥视卡
 置顶卡
置顶卡 变色卡
变色卡