|
q3lfybxmrjf64071559905.gif

8 d, N0 ?# k P! K点击上方蓝色字体,关注我们4 v* q T1 c9 [0 d6 v9 Z
" d8 z4 Y; h9 B4 L) K2 y$ P9 A) U# G6 Y" T
关键是通过精确控制GPIO的时序、波特率、数据位和停止位来完成数据传输。
% ^# c: K0 o- I8 u U4 F1 w. C1 }7 j1 w: i8 S* P7 b. {
这种方法适用于一些没有USART硬件支持的场景,或者当其他硬件资源已被占用时。
% i6 S8 Z9 ?; Z2 F1 V
1 d! N' t2 V$ l4 L& _) J2 K软件串口通信通过控制一个普通的GPIO引脚模拟串口通信的时序。9 f; a/ N, K! A
4 J* Q( A9 w' H它模拟的过程包括发送和接收的时钟控制、数据位的编码和解码、起始位和停止位等内容。
$ Y7 K3 P: W D& l+ B# S1 M8 T0 {% }0 h1 f* E" Y* m* M) d
例如,使用一个GPIO引脚作为TX(数据发送端),另一个作为RX(数据接收端)。& J4 P. ~: H" c
1 P% Y# S: B/ ^4 w3 z+ g
fezmk1glcwi64071560006.png

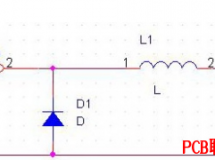
6 m2 v) @, y6 w6 V在数据传输时,TX端会根据约定的波特率按照特定的时序(起始位、数据位、停止位等)发送数据。) s1 I& h) C3 m2 T0 F
6 V' C1 S$ W0 D0 |7 F/ V0 c/ e
接收端RX则需要在固定的时钟节奏下读取数据并解码。
- G9 Q# }# U1 p
# M* Q' j2 v. N' q2 @通常实现方法有两种:6 g5 B/ [& n, H+ e5 F% Q
基于定时器的实现:通过定时器生成精确的时间间隔,确保每一位数据的传输时长精确匹配所选波特率。例如,配置一个定时器以精确产生特定频率的时钟信号,利用定时器的中断或直接在主循环中进行波形控制,从而模拟串口的发送和接收。基于外部中断的接收:接收端可以通过GPIO引脚配置为外部中断模式,当引脚电平变化时,触发中断并在中断服务程序中读取数据。由于接收的数据是按位传输的,因此需要在中断中管理每一位的接收,并按照约定的波特率来解析数据。
/ A; V6 ~9 W2 V1 I, }5 f2 \8 {6 L( H
软件串口通信的优缺点优点:灵活性高:不需要硬件的USART引脚,任何GPIO引脚都可以用来进行通信,适用于没有USART硬件支持的情况。占用资源少:仅通过软件来实现,硬件资源占用较少,不需要额外的硬件模块。便于调试和扩展:可以轻松修改通信协议,适合一些特殊的通信需求。. n. s6 O) f( j, j" |0 S# j% R
[/ol]
; J0 k5 w9 ]. _0 Z& \0 h% o缺点:效率较低:软件串口比硬件串口慢,因为它需要依赖主处理器来处理时序,且需要精确的时延控制,容易受主处理器负载影响。占用CPU资源:由于需要精确的时序控制,软件串口通信会消耗较多的CPU周期,尤其是在高波特率时。受时钟漂移影响大:由于没有硬件支持,时序可能受到系统时钟漂移的影响,需要时常校准。9 r' s& C& Q6 _" P w) U0 s3 }
[/ol]
8 S9 ?% }0 ~0 Y0 {# V7 v
jlw0m4hjjqq64071560106.jpg
 / ?) r0 ^5 {; J+ x7 ~$ U( e: g
/ ?) r0 ^5 {; J+ x7 ~$ U( e: g
a0tgr4pqevb64071560206.gif
 8 x6 h5 J2 V6 V- M: `
8 x6 h5 J2 V6 V- M: `
点击阅读原文,更精彩~ | 















 窥视卡
窥视卡
 置顶卡
置顶卡 变色卡
变色卡