引言' K {# Z/ B2 ]; H- E/ @
4 R: e3 i* X9 o! R/ D `) b- @8 Q" S- M
导航是指规划、记录和控制物体从一个地方到另一个地方移动的过程。从古代使用地标的技术到现代惯性导航系统,融合了传统原理和前沿科技[1]。& G: k1 Q( S# {
1p5rycfyssv64079980057.png
 9 O) m1 ~6 h$ X
9 O) m1 ~6 h$ X
3gmfob2yd2p64079980158.png
 6 w) N; g! E2 c p, @. \& i5 q
6 w) N; g! E2 c p, @. \& i5 q
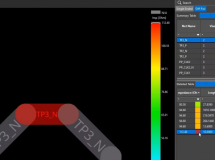
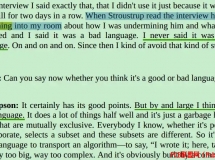
图1.1:万向节系统示意图,展示了陀螺仪、加速度计、万向节、扭矩电机和角度传感器安装在稳定平台上的复杂机械布局。& e) r9 n- u- C4 k# I
' T" l- [6 H! L: z0 K# t
传统导航方法
9 |* b/ d0 F* j% H8 _$ ^! I! D; N% G5 r
最直接的导航方法依赖地标——在参考坐标系中具有已知坐标的可识别物体或特征。地标可以是山丘和河流等自然特征,也可以是街道和建筑等人工结构。在海上导航中,灯塔和天体是可靠的参考点。现代地标包括雷达站、卫星和移动通信基站。
1 Y, D, T: B* d6 Q+ F/ H j! s' u/ o. A
定位是主要的导航技术之一,通过观测已知位置的地标来直接确定位置。这种方法虽然直观,但存在局限性——地标观测并非总是可用,且容易受到干扰和干扰。例如,在有雾或多云天气下,天文导航无法进行,而无线电信号会受到衍射、折射和非视距传输的影响。# F" J# q: o1 s0 f/ U& Z9 P& F7 U
leyet4f1byz64079980258.png

( S V4 }: {9 w; W" K: x图2:展示了(a)万向节惯性导航算法和(b)捷联式惯性导航算法的比较图,说明了惯性导航系统架构的演变。. i/ X I9 w# |3 |5 O/ @/ l! h4 Z
惯性导航系统
; {; }6 q9 u1 R Q& g
) f& o9 c2 U! h& L3 z惯性导航代表了导航技术的重大进步。基于惯性传感器(加速度计和陀螺仪)的测量,在惯性坐标系中追踪运动。惯性导航的主要优势在于基于牛顿运动定律,使其适用于几乎所有导航场景,且不受外部干扰。7 \+ e: `3 T. s/ x* x( S
' n& @3 e; ^2 z. S/ ?, `/ K典型的惯性测量单元(IMU)包含三个正交安装的加速度计和陀螺仪,用于测量三个垂直方向的加速度和角速率分量。系统通过陀螺仪测量角速率来追踪方向,然后通过积分得到系统方向。8 x! j4 `2 U2 R7 Q
coslo00xvmx64079980358.png
 ' s# H ]/ @' w- k
' s# H ]/ @' w- k
图3:IMU发展的对比,展示了(a)20世纪60年代阿波罗任务开发的IMU与(b)当前商用MEMS基IMU的对比,展示了五十年来显著的微型化成就。
d4 ]! ~+ G: O: \$ P5 P惯性导航技术的演进( _) O0 U' J: f6 y" n
9 L! f4 n4 P8 F3 L惯性导航技术的发展跨越近两个世纪,始于19世纪初Bohnenberger提出的惯性传感器概念。1856年著名的傅科摆实验展示了首个角速率积分陀螺仪。但实际应用直到20世纪30年代才在V2火箭上实现,并在60年代末开始广泛应用。
0 b/ V8 g r/ ~# h* {( l4 d$ g K8 a" u- j2 q% c# c4 l
早期系统使用基于万向节的平台,惯性传感器安装在允许三维旋转的稳定平台上。这些系统虽然精度高,但由于复杂的机械和电气基础设施而体积大且昂贵。20世纪70年代末,捷联式系统出现,传感器直接固定在系统上。这种设计大大降低了机械复杂性,但需要更复杂的计算能力。
; P& |) K& M) f( ^3 ^4 Y b
+ Z: X! B5 s2 d: O0 m d过去20年中,微机电系统(MEMS)技术的发展彻底改变了惯性导航。现代MEMS基IMU尺寸仅为毫米级,可以集成到手机和智能手表等便携设备中。这种变化十分显著——阿波罗任务的IMU体积为1.8×10^7立方毫米,重42.5磅,而今天的MEMS基IMU仅占8.55立方毫米,重量只有几毫克。
# S4 C! x4 H2 D9 _2 h现代应用与挑战! N: A; a) x+ t$ k3 p. g. i
5 E' ]6 C2 [2 J, q7 u3 o0 ~当今惯性导航系统面临多种挑战,特别是在步行导航方面。测量误差随时间累积仍是主要问题——消费级IMU在导航几秒内就可能产生超过一米的误差。这促使了各种误差修正技术的发展,如用于脚踝安装系统的零速度更新(ZUPTs)。: @9 \, q6 o2 e# E
4 b; v0 E, u1 h* C( V! b% r; C/ t) L5 M
该领域继续在个人安全、健康监测和紧急救援系统等新应用中发展。惯性导航与GPS、磁力计和计算机视觉系统等其他技术的集成,代表了导航技术的未来发展方向,将惯性系统的可靠性与外部参考点的精确性相结合。
9 u; o3 x, \2 h, p6 V
! Q8 h/ Y4 B; l; k2 c. N# m从古代基于地标的导航到复杂的惯性系统,展现了人类不断追求更精确、更可靠导航方法的历程。随着技术持续进步,更多创新解决方案将不断涌现,进一步提高各种应用中导航系统的精确度和可用性。
/ C% t. g. Z8 R0 \- E. [ 参考文献3 C5 b) }0 y$ k; x( U! r; D
! }. Y C& w5 N; e; \6 F[1] Y. Wang and A. M. Shkel, "Pedestrian Inertial Navigation with Self-Contained Aiding," in IEEE Press Series on Sensors, 1st ed. John Wiley & Sons, Inc., 2021
" p; U/ W# H) m% ZEND+ f4 v0 I5 F1 W4 q% l% ~1 d
2 r) p' i, {3 s x
软件申请我们欢迎化合物/硅基光电子芯片的研究人员和工程师申请体验免费版PIC Studio软件。无论是研究还是商业应用,PIC Studio都可提升您的工作效能。" u) y( @0 H2 A0 I
点击左下角"阅读原文"马上申请
5 m2 l8 ~; M- H4 D" A
$ e+ I. n) X* g- g2 P2 r7 H欢迎转载2 f8 M) g- F I7 C
: ?( J4 N; _+ N& v7 f1 ^1 Y
转载请注明出处,请勿修改内容和删除作者信息!) k& U3 Y) T( i; w
7 o) ^5 a1 U, V9 ~' u; R+ M3 J
5 A8 P) G( @* i4 H& I) m
- h. r+ B2 f6 J3 @4 K0 {8 m) K
u5qxheuxnh264079980458.gif

& X6 R& A. d! }, C9 Z
9 m$ a/ O/ G& N/ x( k. D% w6 ]关注我们& i- ^' F) N% }" p
' ~, W4 j9 a+ d& }- O: G9 o
! ^- w) X: I6 g. P% {
h0lr4hgxelt64079980558.png
 3 r5 U v+ O$ i1 d2 p
3 r5 U v+ O$ i1 d2 p
|
% S. W) f# X5 N/ P" Q, w7 i
15tlvkexxcr64079980658.png

* N: V, C8 C. S* p |
$ _" R$ k3 U1 h* u+ [
2fixxakl0p164079980759.png

5 j& h0 R. P0 w; y4 C" ? |
$ [( F* C1 n; N$ h& n
) O2 F1 h7 Y' z6 {: x9 c2 t9 l+ P% I* P3 c. y8 W
7 v, H- }7 K, `2 D! G |关于我们: _2 n0 u6 R9 V9 U* A1 g3 {
深圳逍遥科技有限公司(Latitude Design Automation Inc.)是一家专注于半导体芯片设计自动化(EDA)的高科技软件公司。我们自主开发特色工艺芯片设计和仿真软件,提供成熟的设计解决方案如PIC Studio、MEMS Studio和Meta Studio,分别针对光电芯片、微机电系统、超透镜的设计与仿真。我们提供特色工艺的半导体芯片集成电路版图、IP和PDK工程服务,广泛服务于光通讯、光计算、光量子通信和微纳光子器件领域的头部客户。逍遥科技与国内外晶圆代工厂及硅光/MEMS中试线合作,推动特色工艺半导体产业链发展,致力于为客户提供前沿技术与服务。
: X2 v# X. n+ x2 N* Z; o$ W2 g O" H L X) z7 ~' g
http://www.latitudeda.com/
: D ?% x5 W m- S7 b* z$ ^(点击上方名片关注我们,发现更多精彩内容) | 




















 窥视卡
窥视卡

 置顶卡
置顶卡 变色卡
变色卡