|
qu2pb5r30es64017589747.gif

5 Y- F9 n' T `6 u2 Y点击上方蓝色字体,关注我们
) ^' H4 n/ G: _8 i0 f
9 s" A, s6 B+ i4 n N5 O: L4 e& M- B* {. O- R8 Y. x: \
对于设计一个小型多关节机械臂控制电路的需求,考虑到实时性、带宽和开发难度,USB 和 Ethernet 是最佳选择。2 F6 D9 U- q9 u3 b
3 s! P, u, X7 T8 o' a" Y
yv4mbp1spcq64017589848.png

4 _6 d8 p$ c+ _$ `1 \USB 作为首选,USB 2.0 可以提供最高 480 Mbps 的传输速度,而 USB 3.0 可以达到 5 Gbps。
0 s4 P8 I1 s1 j- ], S' a" E; `! o5 _
USB 3.0 的延迟一般在几毫秒之内,适合实时反馈控制。
: Y: G& f. @! Z' k9 ~1 |5 R) L. P( x9 [ }
确保使用适当的 USB 驱动和协议栈,以减少软件处理的延迟。# I" r7 a3 W7 l n4 [
: v( _$ F, _5 B: K1 O$ CUSB 提供了高带宽(特别是 USB 3.0 或更高),可以满足机械臂的高速控制需求。
( U/ I1 h1 @, K+ N9 O- S$ m
( W1 l0 Q, {1 D! S/ p它还具有良好的实时性,足以应对实时反馈和控制命令的快速响应。1 F% Y1 N: e7 u. j: l. E
' y2 O$ s3 Y7 l# U5 cSTM32 对 USB 的硬件支持也很完善,不需要额外的硬件转换器,减少了开发难度。
# }' a! s1 p% I. ^: p S1 [# G. H
Ethernet 作为备选,10/100/1000 Mbps(千兆以太网)。4 D7 g C8 P$ h8 [$ D2 _ q& [
0 @2 S2 t4 Q' q( o9 h0 D: J
对于大部分嵌入式系统应用来说,千兆以太网的速度足够应付快速控制和数据反馈的需求。
, l+ J/ [* Q. s! f/ c: b; @! E- }" _
如果未来有更多设备需要联网,或者需要远程控制功能,Ethernet 是一种更为可扩展的解决方案。- i+ N9 c3 x6 ~- v- F' x
- n& G* I1 L, C7 p+ V
适合长距离传输,特别是在工业自动化和智能工厂应用中较为常见。( v2 [3 J: G, \) U9 U- m# y
, E, s/ W- D3 t4 o7 j0 m
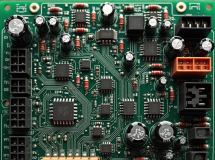
可以使用 STM32 内置的 USB 控制器,配合 STM32CubeMX 配置 USB 设备模式,确保数据流的高效传输。, h; q5 \5 \# U
3 W8 @" R3 m% A对于复杂的多关节机械臂,使用 USB 3.0 可以提供更高的数据吞吐量。
) b% F4 p+ o; r. ?
, x: |, h1 s. b' fSTM32F4、STM32F7 系列支持 Ethernet 控制器,可以通过以太网通信协议(如 TCP/IP)进行控制。! _3 I5 D3 g8 y6 o
, A$ U6 ?& y" F3 M* s2 Q
此时,可能需要使用硬件外部 PHY 芯片来实现以太网连接。4 j& Y5 O- B- g3 G( A& B1 k! c& R
m4avcgkc0wf64017589948.jpg

% @ l; n K6 ?: Q7 j4 T
nudq0funnjj64017590048.gif

2 u. s0 X* K5 [# T( E点击阅读原文,更精彩~ | 




















 窥视卡
窥视卡

 置顶卡
置顶卡 变色卡
变色卡![[新版本]CAM350 v15.1 及 BluePrint v7.1 安装包分享](data/attachment/block/d3/d3338456a83ad668928cc22d024d6d35.jpg)
![[新版本]CAM350 v15.1 及 BluePrint v7.1 安装包分享](data/attachment/block/e6/e62f66f0e16573e6d93e5cc624dae057.jpg)