引言
3 l7 C- s7 X5 T/ c# V, wMEMS陀螺仪在消费电子和汽车系统等多个领域获得广泛应用。这类器件通过检测旋转物体运动时产生的科里奥利力来测量角速度。MEMS陀螺仪设计中的主要挑战之一是管理温度引起的漂移,特别是零速率输出(ZRO)的漂移。本文探讨温度对陀螺仪性能的影响机理,并讨论包括自动正交补偿(AQC)在内的解决方案[1]。6 {; u4 ^* S$ V" A
mhzd32nsyxf64026543540.png

( h; A. ?( o+ `' y3 h
s5upsfcjp0i64026543641.png
 7 e- Y" Q9 g0 `" r0 p! L
7 e- Y" Q9 g0 `" r0 p! L
图1展示了尺寸为(3.8x2.2)mm2的线性四质量传感器及其驱动和检测模式。该器件在工作时的频率约为30.7 kHz,分频400 Hz。驱动模式和检测模式的品质因数分别为6000和1300。
m: m$ z% u( D7 e# @1 e" u; {# M
+ b$ R- H$ a1 F; K1
* V! \0 H3 ]5 |2 N% z& M基本工作原理; q# B- h( Q1 O8 o4 P/ G
幅度调制MEMS陀螺仪的工作原理依赖于驱动模式和检测模式之间的相互作用。当系统旋转时,驱动运动在检测轴上产生表观力。电子线路随后检测检测框架的位移。输出信号经过解调和滤波以提取速率信息。在理想条件下,解调参考信号的相位和频率与检测信号完全匹配。
, \$ }; ~% o8 w- S) h. D
s0xpb0mh3mk64026543742.png
 5 g( a2 R6 x$ c. |5 n
5 g( a2 R6 x$ c. |5 n
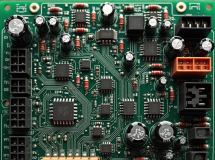
图2显示了用于驱动控制、检测读出、解调和可选AQC实现的混合信号电子系统的框图和实物实现。/ e8 ]' V( G4 O g) V8 X) L
; d: T0 ^& N& C- d. w
2( |! O, U* F! z- a e8 L
温度效应和测量方法
0 C3 `4 \6 p( e* P' b研究温度对陀螺仪性能的影响需要仔细测量几个关键参数。测量设置主要关注三个方面:正交分量、机械驱动频率传递和ZRO输出。这些测量在有无AQC正交补偿的情况下都进行。
) X6 M/ B, r2 X! r
i5xwawfgise64026543842.png

- K/ \# Y& p& G: y F$ Q图3演示了正交分量的提取方法,显示在禁用正交补偿机制时ZRO如何随解调相位误差变化。
% ]# f# m5 p! Y" G* j& a8 j$ J7 e% q: ~, K$ v$ ~, `+ N/ O/ Q
hvqnifnhetj64026543943.png
 0 t- U3 d* x0 [! M
0 t- U3 d* x0 [! M
图4展示了不同温度下正交提取的结果,显示了同一器件在四次重复温度循环中的平均测量值。
, a- x2 Z+ D: C4 C
3 K* ?5 E+ |/ l3
: I' t, H6 J/ j' i性能分析和建模7 v; T, Q5 l& v [, }
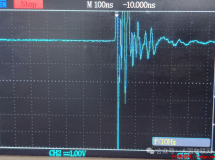
温度效应分析涉及系统的机械和电气方面。驱动频率显示出明显的温度依赖性,这影响着系统的整体性能。开环驱动传递函数提供了温度如何影响系统行为的重要信息。: U- d _# I( _/ J
fhsn12ybh4v64026544043.png
 $ B. W6 o) L0 D% V
$ B. W6 o) L0 D% V
图5显示了不同温度条件下的开环驱动传递函数幅度和相位,揭示了由寄生电容引起的反峰值,该电容随温度变化。% E. b' k3 S$ g1 Y( X
+ b5 J! ^$ @1 }$ R6 v+ D
3l1kmrtelhl64026544143.png
 4 f/ I* r- F8 F" c! B! {7 n
4 f/ I* r- F8 F" c! B! {7 n
图6显示了机械驱动频率随温度的变化,测量结果与文献中的理论预测相符。" m7 Z6 O7 A# b4 t, o
' V! y7 ~5 Z; j1 b
42 ]" g% F9 W' H* E( a# y
结果和验证
% k- |! W2 N R6 U- E- H ^实验结果验证了理论模型对启用和禁用AQC配置的预测。测量结果表明,根据工作架构的不同,漂移机制也不相同。. Q) o( W% }7 a0 I. i* W
l3n2vuh4wq364026544243.png
 : O6 d o; v% k6 U! _6 N
: O6 d o; v% k6 U! _6 N
图7展示了禁用AQC时四次温度扫描的平均值,显示开发的模型预测实验结果的误差在30%以内。9 K# E4 h! i, D5 f' @5 M
1214waqfi5v64026544344.png

; k' X/ G# {6 C) y4 }6 _0 v$ D/ L图8显示了启用AQC时四次温度扫描的平均输出,展示了正交补偿如何影响系统的温度响应。
- w$ {& ]( {2 S/ _6 U2 I: j7 ?7 J; Q/ U, o
5
7 e: g" j$ T+ d3 Y s5 E9 T结论
& \8 h# X6 h" K, W) b对MEMS陀螺仪温度效应的综合分析揭示了理解和补偿热漂移的重要性。该模型通过考虑正交行为和寄生效应,成功预测了输出变化。AQC的实施在减少温度引起的漂移方面效果显著,尽管由于相位误差和灵敏度波动仍存在一些残余效应。这种理解有助于改进陀螺仪在不同温度条件下的性能。
6 K+ `) z- E% Q. h* \# {+ @4 D& s5 _- y
实验验证证实,数学模型能以合理的精度预测输出变化,这对消费级传感器和高端应用都具有实用价值。这些发现有助于开发更稳定、更可靠的MEMS陀螺仪系统。
% Q) [; x, v# z+ E' M9 R2 w; g- ~7 k/ i
参考文献, F% E& j; U4 V; ]& v& U+ K
[1] L. Pileri, M. De Pace, G. Gattere, L. Falorni and G. Langfelder, "Modeling ZRO Temperature Drifts in Gyroscopes With and Without Automatic Quadrature Compensation," in IEEE MEMS 2025, Kaohsiung, Taiwan, 19-23 January 2025, pp. 32-35.; J' A- s- E8 Q" ]- o+ v
END
: O) K( r% l. h' F' q* _2 B3 Z' H J
软件申请我们欢迎化合物/硅基光电子芯片的研究人员和工程师申请体验免费版PIC Studio软件。无论是研究还是商业应用,PIC Studio都可提升您的工作效能。+ B5 _! T* I( I
点击左下角"阅读原文"马上申请0 w3 P* m' u8 k+ _
6 w2 b2 s9 s ~ k b- o欢迎转载) B: q! [4 T/ V( n# k3 z! S
* n! y8 Y O6 E, x4 D! i转载请注明出处,请勿修改内容和删除作者信息!8 y1 ^7 _% E. [/ C+ m& j
0 @) A9 r! I- K7 x" [* _
: Z- K* G% o' S$ b2 e n
6 V& q8 d% w- Z
3el2gjfrfld64026544444.gif

2 c, |" ]1 p8 j$ o
J$ w* t2 I# n, b. G关注我们9 L, x2 _, v2 m* e. h0 f: k/ C
$ c! Q" b- G2 c: B" o7 p2 s. K
% l) n) Q/ ~% j7 ~4 r1 M
lkbvnrlvji264026544544.png
 - W9 K& l2 H3 F+ p5 V# F9 w: b! Z
- W9 K& l2 H3 F+ p5 V# F9 w: b! Z
| 3 p. C( {8 u& c9 q# \
klyqlyfamfs64026544644.png
 . ~& r) z) K4 \9 d& t* @
. ~& r) z) K4 \9 d& t* @
| / ?5 T' t/ G6 ]4 T* F9 u5 ]
eexvbghwefh64026544744.png
 8 O8 p2 G t" h9 j" n8 o
8 O8 p2 G t" h9 j" n8 o
|
! Z4 v [7 g }% Y% @" x
* L7 Q4 q" u6 }+ p3 @
/ H6 R |$ r! [$ g) W. S U% J$ F/ K
关于我们:1 ^8 V! f( |4 o( G
深圳逍遥科技有限公司(Latitude Design Automation Inc.)是一家专注于半导体芯片设计自动化(EDA)的高科技软件公司。我们自主开发特色工艺芯片设计和仿真软件,提供成熟的设计解决方案如PIC Studio、MEMS Studio和Meta Studio,分别针对光电芯片、微机电系统、超透镜的设计与仿真。我们提供特色工艺的半导体芯片集成电路版图、IP和PDK工程服务,广泛服务于光通讯、光计算、光量子通信和微纳光子器件领域的头部客户。逍遥科技与国内外晶圆代工厂及硅光/MEMS中试线合作,推动特色工艺半导体产业链发展,致力于为客户提供前沿技术与服务。
4 a- p" r- n& r% [
! z8 T$ P& @3 [4 @http://www.latitudeda.com/ q8 g! ^, F0 h1 f5 m5 {/ W% t
(点击上方名片关注我们,发现更多精彩内容) | 




















 窥视卡
窥视卡

 置顶卡
置顶卡 变色卡
变色卡![[新版本]CAM350 v15.1 及 BluePrint v7.1 安装包分享](data/attachment/block/d3/d3338456a83ad668928cc22d024d6d35.jpg)
![[新版本]CAM350 v15.1 及 BluePrint v7.1 安装包分享](data/attachment/block/e6/e62f66f0e16573e6d93e5cc624dae057.jpg)