|
|

“ 一起来看看实测的效果。 ”
ncm2fdtlgyw64090441.png

测量
x2lkhpldt2o64090541.png

在ArduPilot Mission Planner中配置任务任务已通过 ArduPilot Mission Planner 预先编程设定。无人机将自动飞越预设航点,任务中还包含设置ROI(关注区域)的命令以确保天线始终指向该区域,并通过任务中的 digicam 配置命令启动雷达测量。该命令原本用于配置普通相机,但我对雷达微控制器进行了编程,使其能够响应此命令。利用现有命令可轻松实现雷达与现有 ArduPilot 软件的协同工作。
为实现聚光灯成像模式所需的 ROI 设置,需要对 ArduPilot 固件进行补丁修改。默认情况下无人机头部始终指向 ROI,而无法配置为仅天线指向 ROI。该补丁已作为 PR 提交至 ArduPilot 的 Github 仓库。
yv3qezop5rz64090642.png

飞行中的无人机
场景为一片开阔的野外场地。在天线指向方位约1.5公里外可见森林边缘。无人机以5米/秒的速度沿直线飞行,保持110米高度,航程约500米。雷达参数设置为:仅发射VV极化波,扫描时长400微秒,工作带宽500 MHz,脉冲重复频率1 kHz。
iy3a1dusrtk64090742.png

范围压缩原始数据距离压缩(傅里叶变换)后的采集数据看起来并不直观。由于天线波束较宽,每次扫描会捕获不同角度的多个目标,因此数据并不呈现传统图像形态。
在零距离处存在显著的发射-接收(TX-RX)泄漏响应,随后在100米处可见地面反射信号。尽管天线正下方的增益远小于波束中心,但由于反射角度和近距离效应,正下方的反射信号依然非常强烈。在较大的距离上,反射信号大多低于单次扫描的噪声水平。然而,在图像形成过程中,会将多次扫描的数据进行整合,这样可以提高信噪比,从而使得远处的一些目标也能够在最终形成的图像中显现出来。某些大型孤立物体清晰可见,其与雷达的距离会随着无人机运动产生变化。
usqevh0vrvh64090842.png

通过 GPS 和 IMU 记录的无人机位置和天线指向矢量
理想情况下,飞行轨迹应为直线,但由于风力等环境因素存在一定扰动。该无人机重量极轻,即使微风也容易对其飞行姿态产生影响。由于感兴趣区域(ROI)设置距离较远,测量过程中天线指向方向仅产生数度的微小变化。
jk0uyzezu5m64090942.png

未聚焦的 SAR 图像
上图展示了未经自动聚焦处理的SAR图像,该图像基于成像算法内部使用的伪极坐标系生成。所谓"伪极坐标"是指其角度轴采用弧度的正弦值而非直接弧度值,这种坐标系在计算效率上略优于常规极坐标系。该图像由51,200次扫描数据合成,分辨率达到6000×20000像素。
相较于原始数据,处理后的图像质量可谓天壤之别。虽然各类地形特征已清晰可辨,但由于采用极坐标形式,与常规地图的直观对比仍存在困难。
0uvxiknaumz64091043.png

未聚焦的 SAR 图像
通过将伪极坐标图像投影至笛卡尔网格,可获取笛卡尔坐标系图像。相较于直接在笛卡尔网格上成像,这种投影转换具有显著的速度优势。基于无人机电子罗盘的方位测量数据,图像已进行北向校准处理。由于旋转校正操作,图像左角存在小范围数据缺失。
当前成像结果仍存在明显模糊现象。这表明仅依赖GPS和惯性测量单元(IMU)的定位精度尚不足够,需通过自聚焦算法优化处理才能获得高清晰度的聚焦图像。
aavpaaevkp564091144.png

自动聚焦的 SAR 图像
经过30次最小熵梯度优化自聚焦迭代处理后,图像质量显著提升。尽管五次迭代可能已足够收敛,但增加迭代次数仍能略微提升成像效果。由于每次迭代均需执行反投影算法的前向与反向计算,该处理过程耗时数分钟。
受低入射角影响,树木等高大物体在图像中投射出长阴影。图像振幅未进行归一化处理,因此靠近坐标原点的区域呈现较高亮度。天线辐射方向图特征在图像中亦有明显体现:波束中心略微右倾,而图像左侧区域因偏离波束中心导致天线增益显著降低,故该区域亮度较低。
nzirh4x13ef64091244.png

合成孔径雷达图像细节对比。无自动对焦(左)和使用最小熵优化自动对焦(右)
放大观察处理后的雷达图像可见丰富细节。对比300×300米区域的自动聚焦处理效果可见,经优化的图像能清晰呈现农田地表细节,而未进行自聚焦处理的图像该区域仅呈现模糊影像。
尝试采用相位梯度自聚焦算法时,其处理效果欠佳,所得图像质量与未进行自聚焦处理的原始图像基本相当。
图像左下角的三条线性特征对应高压输电线。此类目标仅在雷达波束与其呈90度正交角时具备可探测性,其他入射角度下因反射率过低而无法成像。
uzbsf1veubg64091344.png

原始及优化后的速度
对比优化处理前后的无人机飞行速度参数可见,各方向速度分量的调整幅度并不显著。其中沿轨迹方向与距离方向的速度分量均呈现小幅调整,而高度方向速度分量基本维持不变。全极化测量
g33hnl1jcei64091445.png

SAR成像区域的谷歌地图卫星截图
在另一地点采用全极化模式(四种极化组合)进行了补充测量。雷达系统仍沿自主规划的直线航迹飞行,但此次快速切换四种极化状态。扫描时长缩短至200微秒,各极化通道的脉冲重复频率保持715赫兹,其余参数与前期实验一致。成像处理仍采用 51,200 次扫描数据。
d0dayskemw064091545.png

四种极化模式下的SAR图像对比
四组极化图像呈现高度相似性,主要差异体现在交叉极化图像(HV与VH)的振幅较弱,这源于目标对交叉极化信号的反射率普遍低于同极化分量。
3wosnzfjjwh64091646.png

极化合成SAR图像(经自聚焦处理)
不同于单独显示各极化图像,常规做法是将不同极化信息映射至RGB颜色通道进行融合显示。该彩色合成图像能直观反映目标对不同极化电磁波的反射特性:地面区域呈现紫色调,表明其对VV和HH极化波的反射优于交叉极化分量;建筑物及道路沿线灯杆亦呈现类似特征;森林区域显示为白色,说明其对各极化波的反射强度基本相当。由于未对天线方向图效应及各极化切换状态的通道差异进行校准,部分观测差异可能源自硬件特性。更高精度的测量需实施系统校准。
图中(200, 500)米坐标区域密集点状特征对应一处园艺区,其内每棵小型树木均围有金属丝网结构。
q0uluncqkwf64091746.png

SAR图像中位于(-50, -80)米坐标处的地面实景照片(朝向负Y轴方向)
测量期间地表覆盖少量积雪。该可见光照片拍摄视角与SAR图像顶部俯视方向一致。图中左侧的小片树林对应SAR图像中部的树丛区域。
视频SAR成像
wrckh0f3aed64091847.png

无人机执行八角形航迹的航点规划,红色标记为天线指向的感兴趣区域(ROI)
此前的测量通过长基线数据合成了单幅高分辨率图像。而通过单次长时测量获取多段短基线数据,可生成多幅连续图像并进一步合成视频序列。
反投影算法对飞行轨迹无线性要求,因此本次实验编程控制无人机沿八角形航迹飞行,并保持天线始终指向八角形中心。
每帧图像由1024次雷达扫描数据生成,其中512次扫描与前帧数据重叠。由于单帧数据量少于全分辨率图像,视频帧的噪声水平较高且角分辨率有所下降。视频播放速度约为实际速率的10倍。采用全极化模式,色彩编码方案与前述极化SAR图像一致。
各帧独立进行自动聚焦处理且未实施帧间配准,导致视频中偶现轻微抖动或跳变现象。八角形航迹的拐角区域对成像算法挑战较大,需同时精确解算沿轨与跨轨方向的位置信息以保障图像质量。由于各帧基线长度存在差异(仅扫描次数相同),不同帧间的角分辨率可能有所波动。
自然目标(如地面与森林)在各帧中表现稳定,但视频中可观察到若干强反射现象:例如桥梁与输电线在雷达波束正交时产生显著回波。桥梁护栏的闪烁效应形成移动亮斑。不同极化通道的天线方向图差异亦可见于目标色彩变化——同一目标在波束中心与边缘区域可能呈现轻微色差。
成像几何关系
rmf2t5dviu364091947.png

飞行高度120米时的雷达入射角
在无特殊许可情况下,无人机最大飞行高度限制为120米。SAR成像通常采用10至50度入射角。当入射角接近90度(垂直下视)时,反射功率较高,但邻近目标的距离差异极小导致距离分辨率劣化。低入射角虽能提升距离分辨率,但受低掠射角影响,回波功率显著降低。极端低入射角下的反射功率较常规45度入射角可能衰减10至20分贝,极大限制雷达探测距离。
另一关键问题是高大物体引发的阴影效应。例如,120米飞行高度下,2公里距离处的掠射角仅为3.4度。此时10米高的树木将投射长达170米的阴影,完全遮蔽其后方的地面回波。所有测量数据中均清晰呈现此现象,尤其在极化测量中,远距离处仅能识别建筑物顶部结构。
结论
该合成孔径雷达无人机系统成像距离至少可达1.5公里,若提升飞行高度探测范围可进一步扩展。整套系统(含雷达、无人机及电池)总重不足1千克,具备HH、HV、VH、VV全极化测量能力。基于梯度最小熵的自聚焦算法配合非RTK级GPS与惯性测量单元(IMU)传感器数据,即可利用宽波束天线获取高质量成像。系统成本构成包括:无人机约200欧元,两片雷达电路板600欧元,以及本人利用业余时间持续10个月的研发投入。考虑到系统的低成本,其性能表现令我十分满意。
原文转载自 https://hforsten.com/homemade-polarimetric-synthetic-aperture-radar-drone.html,已进行翻译及校对优化
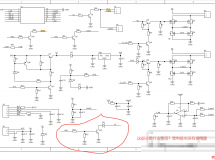
附:原理图 PDF 下载:
zxavzejlm2s64092047.jpg

注意:如果想第一时间收到 KiCad 内容推送,请点击下方的名片,按关注,再设为星标。
常用合集汇总:
和 Dr Peter 一起学 KiCad
KiCad 8 探秘合集
KiCad 使用经验分享KiCad 设计项目(Made with KiCad)常见问题与解决方法KiCad 开发笔记插件应用
发布记录 |
|


















 窥视卡
窥视卡

 置顶卡
置顶卡 变色卡
变色卡![[新版本]CAM350 v15.1 及 BluePrint v7.1 安装包分享](data/attachment/block/d3/d3338456a83ad668928cc22d024d6d35.jpg)
![[新版本]CAM350 v15.1 及 BluePrint v7.1 安装包分享](data/attachment/block/e6/e62f66f0e16573e6d93e5cc624dae057.jpg)