|
62| 0

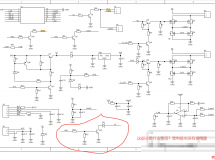
无人机载合成孔径雷达系统研制手记(一):设计原理 |

| ||












Copyright ©2015-2022 长沙市凡亿教育科技有限公司 Powered by©Discuz! 技术支持:凡亿教育 ( 湘ICP备2024059722号 )




 窥视卡
窥视卡


 置顶卡
置顶卡 变色卡
变色卡![[新版本]CAM350 v15.1 及 BluePrint v7.1 安装包分享](data/attachment/block/d3/d3338456a83ad668928cc22d024d6d35.jpg)
![[新版本]CAM350 v15.1 及 BluePrint v7.1 安装包分享](data/attachment/block/e6/e62f66f0e16573e6d93e5cc624dae057.jpg)