|
|
|
0pf3ozeevum6403132229.gif
 & [- ]3 U3 W1 O
& [- ]3 U3 W1 O
点击上方蓝色字体,关注我们) L, a" s8 m1 n5 f# O
+ ]2 e% O7 e- S" \
: P2 O; v5 }: Y5 `
1
8 a2 \1 ?$ u0 p) k" ^步进电机工作原理: b0 w9 }! D) c7 x' v5 K
1. 步进电机类型
4 e6 g% j$ T5 ?2 u步进电机主要包括:
5 j4 `1 Y9 X& |$ Q% M反应式步进电机(VR型)永磁式步进电机(PM型)混合式步进电机(HB型)
; y* V: v' E, y+ s$ ?, X0 ?& J5 |$ U& I X
目前工业场合中,最广泛使用的是混合式步进电机(HB型),其特性为:+ o8 m, @7 X- F0 H, K, e
步距角小,精度高保持力矩大启动性能优异 `; t8 ] O0 A8 \* _! [
afznigxbj4h6403132329.png
 + O- q/ K2 a1 K" I; t" j! `
+ O- q/ K2 a1 K" I; t" j! `
2. 步进电机控制特性, \$ J4 M8 I& N M
步进电机的每一步运动都是固定角度的增量位移,且无需反馈即可实现定位控制。& D# {$ o) i D ~
7 c0 y5 d. {6 Q+ l这种开环控制特性非常适合一些对精度要求较高,但不需要闭环反馈的场合。. t; {! e7 _* }! I! p/ Q+ H
2$ E# e* |: I! R6 E* ^* [4 H
STM32步进电机驱动电路设计3 }" w1 D3 r8 Z6 W* B1 v
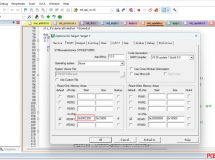
1. 硬件选型
% w- h o, G9 P9 u6 m2 K0 d6 ]主控MCU:STM32F103C8T6
9 e% Q* C5 V* a# W8 A. G2 U驱动器:DRV8825(常见于3D打印机和CNC设备)
& ?1 z" ?% t9 J电机:17HS4401(1.8°步距角,2A相电流)
9 ]0 ^4 w/ n8 v% Y
' d9 N! x w5 P3 L1 x* q+ O4 j6 e* a* Q# A5 Q1 p
2. 硬件连接
% l: ]. m, e: Q4 hSTM32引脚DRV8825引脚功能PA0DIR方向控制PA1STEP脉冲输入GNDGND地5VVCC电源" W% n q9 y& l$ h
3" ]: ~! O7 Z: B1 t$ ~
步进电机细分与精准运动控制& {; F/ N8 I8 a+ f% o
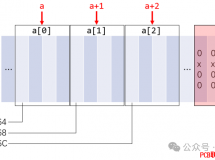
1. 步进电机的步距角计算
3 y0 k# G! t8 y; P" W! k" T" J* f3 A在普通情况下,步进电机的步距角公式为:
% Z3 F( R) W; n( x$ L- X
oc3s0vxq1uk6403132429.png
 4 @ i6 f# O# R0 e, D
4 @ i6 f# O# R0 e, D
其中:
* `) G8 H1 G4 i5 J' i6 M; F/ ^7 yθ为每步的角度N为步进电机的步数& r( n7 q2 I. A6 Y* X7 r. t
) G: Z0 J4 N" T3 Z' D
例如,常见的17HS4401电机为200步/圈,其步距角为:: X& t- C; D# r
kepekaeqtf26403132529.png

0 A* j/ D3 | }9 H2. 细分控制原理' O _- X: z. K9 X& V7 s8 E) I
采用DRV8825进行细分驱动,可设置16细分、32细分甚至128细分,以提升角度精度。
, s- h, E+ c- Q) W
9 Y( g8 u7 t! S7 o# e+ ^% f, U9 Q例如:
1 h) B, x1 g6 r% E" l4 P% ~5 N7 Z1 a! p0 R) E' ^( t! w
细分模式每步角度每圈脉冲数全步1.8°2001/2细分0.9°4001/16细分0.1125°32001/32细分0.05625°64003. 控制脉冲生成
* N! \4 D9 d( C# u要实现精准运动控制,必须产生固定频率的脉冲信号,STM32的定时器正好可以实现这一点。+ s- X: a4 T4 d$ a2 w
L F0 W/ m- A/ \配置步骤:配置TIM2为定时器模式,产生固定频率脉冲配置GPIO控制DIR引脚,决定旋转方向使用中断服务函数ISR,控制STEP脉冲信号[/ol]
2 Q# T8 f( T, h z- y
& Z! i9 s. `, I1 t* c6 m7 s示例代码:
, m& D0 s# \2 k# O# {+ n& j+ D3 V1 z% k b8 s7 |
2 v9 x! r6 G+ p {. i! s# q
void TIM2_IRQHandler(void){ if(TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) { GPIO_SetBits(GPIOA, GPIO_Pin_1); // 产生一个STEP上升沿 delay_us(5); GPIO_ResetBits(GPIOA, GPIO_Pin_1); TIM_ClearITPendingBit(TIM2, TIM_IT_Update); }}通过调整TIM2的频率,即可精确控制步进电机的转速。4 K, X0 P2 r7 c+ X9 U1 L
4
4 E& [% t- n Y$ z速度曲线规划(加减速控制)
! d" b9 [+ X! H7 e1 J- |1. 加速曲线的重要性7 T Z- ~7 t0 X; r Y; a! v- z- ]
在实际应用中,若步进电机直接从零速到高速,会出现丢步、振动等问题,因此必须设计加速曲线。
% _9 q. w0 [8 @% J2 K4 l5 \! P; V% y/ R% h' P4 T. P8 a ~
2. 梯形加速算法) _ a+ R& Q8 M9 I& A
采用梯形加速算法是最常见的方案,其核心思想是:
, g7 W1 L% [) ^1 E1 a! [加速阶段:脉冲间隔时间逐渐减小恒速阶段:脉冲间隔保持恒定减速阶段:脉冲间隔逐渐增大4 c+ _2 Z9 c7 _1 V+ ^4 a
# E" I5 W! p% f* q
+ J8 \( `# F! a- R. R0 G$ V, c
3. 代码实现& D* |4 \" r% {* f+ {0 H0 [
for(int i=0; i{ delay_us(pulse_interval); GPIO_SetBits(GPIOA, GPIO_Pin_1); delay_us(5); GPIO_ResetBits(GPIOA, GPIO_Pin_1);}" q( k& r8 g B" j1 {5 r
5! X! C1 A( k9 ?! K2 U4 L. t% x
闭环反馈的必要性: `" Z2 A( }: @, z8 [' p5 C
1. 闭环反馈原理
2 s% f* P9 ?. ?/ Y' z1 m4 v0 b在高精度应用中,可以通过光电编码器实现闭环控制,确保电机实际运动与预期一致。
; J v& W+ ^9 u+ S7 t) B& y4 Y! d# W1 @2 }
2. 简化反馈代码
, U& X+ b! B$ b$ i: M! i& C& lif(target_step > actual_step){ // 补偿丢失的步数}在实际项目开发中,还可以结合PID算法、CAN通信等技术,实现更高性能的步进电机控制系统。! I2 Q( e. {3 y( Q7 d
3iwb40y1e1p6403132629.jpg

% @* S5 v! N$ _! L9 _! [
ttjvmsqjivl6403132729.gif
 ! |: L9 x [7 u( N/ k: w0 e
! |: L9 x [7 u( N/ k: w0 e
点击阅读原文,更精彩~ |
|


















 窥视卡
窥视卡

 置顶卡
置顶卡 变色卡
变色卡