|
|

关注公众号,回复“入门资料”获取单片机入门到高级开挂教程
开发板带你入门,我们带你飞
文 | 无际(微信:2777492857)
全文约7078字,阅读大约需要 15 分钟
雷猴啊~我是你们那个有点毒舌但靠谱的技术朋友。
最近内容越来越多,头发越来越少,又爆肝2天2夜,写了一篇5000字+的文章,先点赞收藏起来,以后这样写代码,经理看到都敬你三分。
今天咱们来聊聊嵌入式软件的三个层次,看看你到底是刚摸到门的新手,还是有点追求的进阶玩家,亦或是已经站在山顶俯视众生的大佬。
别紧张,这不是考试,也不是要给你打分,就是随便聊聊,顺便让你照照镜子,看看自己站哪块地。
单片机开发这玩意儿,说白了跟做菜差不多,有人刚学会炒蛋,有人能做满汉全席,还有人能把炒蛋玩出花来。
为了让大家更直观地理解这三个层次的区别,咱们以无际单片机的防盗报警主机项目部分功能为例,声明下,只是举例简化版的伪代码,并非项目实际代码。
1. 第一层萌新:能跑就行,别管啥样
刚开始玩单片机的时候,谁不是从新手村摸爬滚打出来的?我当年也是,写个代码跟小学生写作文似的,能凑合看懂就谢天谢地了。这层次的开发者,最大的特点就是“实用主义至上”——代码能跑,功能凑合实现,至于好不好看、效率高不高,那是以后的事儿。
就像你刚学会做菜,炒个蛋能熟不糊锅就觉得自己是天才,至于盐多盐少、盘子漂不漂亮,谁管呢?
1.1 这个阶段有哪些症状?
1.1.1 代码风格?那是啥?
变量命名完全看心情,今天用a、b、c,明天用x、y、z,后天心情不好直接上中文,比如灯亮、灯灭。缩进?不存在的,代码就像被风吹乱的头发,东倒西歪。别人看你的代码,得先猜你在干嘛。更有甚者,代码里全是拼音,比如deng_shan(灯闪),看着像技术代码,其实是“中式英语”的变种。
1.1.2 功能实现糙得像毛坯房
想让程序等一秒?简单,扔个for循环,i从0数到10000,CPU就老老实实干等着。效率是个啥?没听说过。
LED要闪烁?那就P1 = 0xFF点亮,再P1 = 0x00熄灭,循环搞定,至于CPU累不累,跟我啥关系?简直是把单片机的命不当命。
1.1.3 调试全靠玄学
程序出问题了怎么办?串口疯狂printf,打印一堆乱七八糟的东西,靠肉眼在屏幕上找线索。
更“高级”点的,可能用LED灯当信号灯,亮一下是“这里没问题”,灭一下是“救命我崩了”。
1.1.4 复制粘贴就完事儿
代码全靠复制粘贴,抄过来改改数字,能跑就行。至于为啥这么配,完全不懂,反正动了就崩,不动就用呗。
datasheet?那是天书,看不懂也不想看。更搞笑的是,有人抄代码抄错了,把人家调试用的printf也抄进来,结果单片机没串口,程序直接崩,愣是找了一天都没发现问题。
1.2 假如萌新去开发防盗报警功能
咱们来看看新手村的开发者会怎么写这个防盗报警主机的代码:
#include "stm32f10x.h"void delay_ms(uint32_t ms){ uint32_t i; for (i = 0; i { uint32_t j; for (j = 0; j 7200; j++); // 粗略延时 }}int main(void){ // 使能GPIO时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOC, ENABLE); // 配置GPIO GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(GPIOA, &GPIO_InitStruct); // 传感器输入 GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStruct); // 蜂鸣器和LED GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOC, &GPIO_InitStruct); // 按键输入,上拉 // 配置USART1 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStruct); // TX引脚 USART_InitTypeDef USART_InitStruct; USART_InitStruct.USART_BaudRate = 9600; USART_InitStruct.USART_WordLength = USART_WordLength_8b; USART_InitStruct.USART_StopBits = USART_StopBits_1; USART_InitStruct.USART_Parity = USART_Parity_No; USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_InitStruct.USART_Mode = USART_Mode_Tx; USART_Init(USART1, &USART_InitStruct); USART_Cmd(USART1, ENABLE); unsigned char armed = 0; // 0:撤防, 1:布防 while (1) { // 检测按键切换布防状态 if (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_0) == 0) { armed = !armed; delay_ms(20); // 简单防抖 while (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_0) == 0); // 等待松开 } if (armed) { if (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == 1 || GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_1) == 1) { GPIO_SetBits(GPIOB, GPIO_Pin_0 | GPIO_Pin_1); // 触发报警 while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); USART_SendData(USART1, 'A'); // 发送报警信号 delay_ms(100); } else { GPIO_ResetBits(GPIOB, GPIO_Pin_0 | GPIO_Pin_1); } } else { GPIO_ResetBits(GPIOB, GPIO_Pin_0 | GPIO_Pin_1); } }}
功能说明:通过轮询检测按键和传感器状态,布防时触发蜂鸣器和LED报警,并通过串口发送字符'A'。
这代码乍一看没毛病,功能也能实现:按键切换布防撤防,布防状态下传感器触发就报警。但你仔细想想,这代码问题多多:
1.2.1 代码分析
?功能:通过忙等待检测按键和传感器状态,布防时触发蜂鸣器和LED报警,并通过串口发送字符'A'。
?特点:
?简单直接:所有逻辑写在main函数中,易于理解。
?效率低:使用delay_ms忙等待,浪费CPU资源。
?无安全性:任何人都能按键切换状态,无保护。
?扩展性差:代码耦合严重,难以修改或增加功能。
1.2.2 为什么会这样?
新手村的开发者,通常是刚接触单片机不久,可能连C语言都没学扎实。他们的目标很简单:让硬件动起来,看到LED亮了、蜂鸣器响了,就觉得自己成功了。这种“能跑就行”的心态,其实挺正常的,毕竟谁不是从零开始的呢?
但这种代码的问题在于,它只适合“玩具项目”。一旦项目复杂起来,比如防盗报警主机要加显示屏、联网功能,或者多几个传感器,这代码就彻底崩了。改不动、调不通,最后只能推倒重来。所以,新手村的阶段虽然美好,但不能待太久,得赶紧往上爬。
2. 第二层,有点东西但不多
爬出新手村,你就到了进阶区。这时候的你,已经不是那个只求“能跑”的愣头青了,开始有点追求,想让代码不仅能跑,还要跑得好看。
就像做菜,你学会了刀工、调味,开始琢磨怎么把盘子摆得像样点,味道也得让人夸一句“不错”。
进阶区的开发者,已经有点“职业选手”的味道了,但离顶级大神还有段距离。
2.1 进阶玩家的标志
2.1.1 代码开始像人话了
变量命名有了规律,比如armed、alarm_triggered,一看就知道干啥用的。缩进整齐,注释到位,别人看你的代码,不用猜半天,至少能顺着逻辑走一遍。甚至有些人会用匈牙利命名法,比如bArmed表示布尔型的布防状态,看着就专业。
2.1.2 功能实现有了讲究
不再用delay()忙等待,改用定时器中断,CPU终于能喘口气干点别的。代码也开始模块化,一个函数干一件事儿,不再是啥都塞main里的大杂烩。比如传感器检测单独写个函数,报警处理再写一个,改起来方便多了。
2.1.3 调试不再抓瞎
你开始用调试工具了,比如Keil的仿真器,或者接个逻辑分析仪,看看信号波形。出问题不再是大海捞针,而是有点章法地找线索。我见过一个进阶玩家,调试时直接用示波器测中断信号,问题两分钟就定位了,比新手村的“LED灯闪烁法”高明多了。
2.1.4 代码能独立写出来了
写代码不只是会复制粘贴了,一出问题靠猜的阶段了,能利用好"轮子",并在此基础上改代码,甚至自己独立完成项目功能,只是架构设计上不太好。
2.2 进阶版的防盗报警主机代码
来看看进阶区的开发者会怎么改进这个代码:
#include "stm32f10x.h"typedef enum{ STATE_DISARMED, // 撤防 STATE_ARMED, // 布防 STATE_ALARM, // 报警 STATE_PASSWORD // 密码输入} SystemState;#define PASSWORD_LEN 4unsigned char password[PASSWORD_LEN] = {1, 2, 3, 4}; // 示例密码unsigned char input[PASSWORD_LEN];unsigned char input_index = 0;SystemState current_state = STATE_DISARMED;volatile unsigned char update_flag = 0; // 状态更新标志// 传感器读取unsigned char read_sensors(void){ return (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) | (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_1) 1));}// 密码验证unsigned char check_password(void){ for (unsigned char i = 0; i { if (input != password) return 0; } return 1;}// 状态机更新void update_state(void){ switch (current_state) { case STATE_DISARMED: GPIO_ResetBits(GPIOB, GPIO_Pin_0 | GPIO_Pin_1); if (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_0) == 0) { current_state = STATE_PASSWORD; input_index = 0; GPIO_SetBits(GPIOB, GPIO_Pin_1); // LED提示输入 while (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_0) == 0); // 防抖 } break; case STATE_ARMED: if (read_sensors() != 0) { current_state = STATE_ALARM; } if (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_0) == 0) { current_state = STATE_PASSWORD; input_index = 0; GPIO_SetBits(GPIOB, GPIO_Pin_1); // LED提示输入 while (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_0) == 0); // 防抖 } break; case STATE_ALARM: GPIO_SetBits(GPIOB, GPIO_Pin_0 | GPIO_Pin_1); while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); USART_SendData(USART1, 'A'); if (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_1) == 0) { current_state = STATE_ARMED; GPIO_ResetBits(GPIOB, GPIO_Pin_0 | GPIO_Pin_1); while (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_1) == 0); // 防抖 } break; case STATE_PASSWORD: if (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_1) == 0) { input[input_index++] = 1; // 简化为按键输入1 GPIO_ToggleBits(GPIOB, GPIO_Pin_1); // LED闪烁提示 while (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_1) == 0); // 防抖 if (input_index == PASSWORD_LEN) { if (check_password()) { current_state = (current_state == STATE_ARMED) ? STATE_DISARMED : STATE_ARMED; } else { current_state = STATE_DISARMED; GPIO_SetBits(GPIOB, GPIO_Pin_0 | GPIO_Pin_1); for (volatile uint32_t i = 0; i 50000; i++); // 短促报警 GPIO_ResetBits(GPIOB, GPIO_Pin_0 | GPIO_Pin_1); } } } break; }}// 定时器中断服务void TIM2_IRQHandler(void){ if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) { TIM_ClearITPendingBit(TIM2, TIM_IT_Update); update_flag = 1; // 仅设置标志位 }}int main(void){ // 时钟配置 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOC | RCC_APB2Periph_USART1, ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); // GPIO配置 GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(GPIOA, &GPIO_InitStruct); // 传感器 GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStruct); // 蜂鸣器和LED GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOC, &GPIO_InitStruct); // 按键 // USART1配置 GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStruct); // TX USART_InitTypeDef USART_InitStruct; USART_InitStruct.USART_BaudRate = 9600; USART_InitStruct.USART_WordLength = USART_WordLength_8b; USART_InitStruct.USART_StopBits = USART_StopBits_1; USART_InitStruct.USART_Parity = USART_Parity_No; USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_InitStruct.USART_Mode = USART_Mode_Tx; USART_Init(USART1, &USART_InitStruct); USART_Cmd(USART1, ENABLE); // TIM2配置(10ms中断) TIM_TimeBaseInitTypeDef TIM_TimeBaseStruct; TIM_TimeBaseStruct.TIM_Period = 10000 - 1; // 10ms TIM_TimeBaseStruct.TIM_Prescaler = 7200 - 1; // 72MHz / 7200 = 10kHz TIM_TimeBaseStruct.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseStruct.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStruct); TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); TIM_Cmd(TIM2, ENABLE); // NVIC配置 NVIC_InitTypeDef NVIC_InitStruct; NVIC_InitStruct.NVIC_IRQChannel = TIM2_IRQn; NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0; NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStruct); while (1) { if (update_flag) { update_flag = 0; update_state(); // 在主循环中更新状态 } }}
2.2.1 这代码比新手村强在哪?
?模块化初现:传感器检测、报警处理、按键检测都分成了函数,可读性提高。想改传感器逻辑?直接找check_sensors(),简单明了。
?中断驱动:用定时器中断检测传感器,CPU可以干别的事,比如检测按键,不用傻乎乎地忙等待了。
?规范性提升:变量命名有意义,逻辑分块,别人看代码至少能猜出个大概。注释虽然不多,但关键地方有了提示。
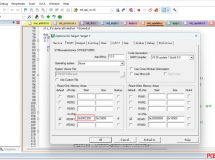
?硬件利用:开始配置定时器和串口寄存器,不完全靠抄了。比如定时器的计算,10ms的溢出时间是自己算出来的,看着就专业。
2.2.2 但还有啥不足?
?耦合度高:功能模块之间仍有关联,比如alarm_triggered是全局变量,改起来不够灵活。
?安全性不足:仍无密码保护,小偷按一下按键照样撤防。
?报警简单:触发后持续报警,无复位机制,用户体验差。
?功耗没考虑:CPU一直在跑while(1),电量哗哗流,像个不关水的水龙头。
2.2.3 进阶区的瓶颈
进阶区的开发者,已经能写出“能用”的代码了,但离“好用”还有距离。他们的代码像个半成品房子,外观不错,功能齐全,但细节不够讲究。
比如知道模块化好,但不知道怎么设计低耦合的模块。这种状态,就像厨师学会了摆盘,但菜的味道还没到极致,吃着不错,但不惊艳。
我在这个阶段徘徊了好几年,受限于公司项目,接触不到好的代码,代码虽然分了模块,用了中断,但每次加新功能都得改老代码,改到最后自己都烦了。这代码咋越写越乱呢?其实不是代码乱,是我还没学会更高层次的架构设计。
2.2.4 怎么提升?
想爬到大师殿堂,我给几条路子:
学架构:研究状态机、事件驱动这些设计方法,别让代码逻辑乱成一团麻。状态机听起来高大上,其实很简单,就是把系统分成几个状态,状态之间按规则切换,后面大师级的代码会给你示范。
优化细节:想想怎么省电、怎么提速,比如用位操作代替复杂逻辑,用静态变量减少内存开销。
多看牛人代码:去GitHub上找找单片机开源项目,看看高手咋写的,模仿着来。别怕看不懂,看多了自然有感觉。
多找复杂项目做:接点复杂点的项目,像联网设备、网关,逼自己解决大问题,水平自然就上去了,比如无际单片机的项目6,我们光研发出来都差不多花了1年时间。
半山腰的风光虽好,但山顶的景色更美,别停下脚步,继续爬吧!
3. 第三层:架构、算法、功耗我全都要!
到了大师殿堂,你就不是普通开发者了,你是单片机界的“米其林三星厨师”。
代码不仅要跑得好,还要美得像诗,高效得像机器,优雅得让人想鼓掌。
这层次的开发者,已经把技术和艺术玩到了一起,写代码跟画画似的,既实用又有灵魂。他们的代码,不仅能解决问题,还能让人看了拍案叫绝。
下面,我将引入之前文章提到的状态机和表驱动的设计模式,重构一下代码,让代码结构更清晰、灵活,易于扩展和维护。
在此之前,我先提一下,这种级别代码的特点。
3.1 大师代码特点
3.1.1 优雅又实用
结构优雅,每一行都像是精心设计过的艺术品。别人看你的代码,不仅能学技术,还能感受到一种美感。比如变量名起得像散文,函数分工像交响乐,注释少但字字珠玑。
3.1.2 功能实现极致
性能优化到极致,比如用位操作代替复杂逻辑,用内联汇编榨干CPU的每一滴性能。资源利用率高得吓人,连一字节RAM都不浪费。甚至能根据硬件特性调整算法,让软硬件配合得天衣无缝。
3.1.3 调试机会都不多
出问题?大师一出手,立马定位,连日志都不用多打。甚至写代码时就把坑都填了,bug压根没机会冒头,大概7,8年前,我就领教过一个大佬的代码,至今回味无穷。
3.2 大师级的防盗报警主机代码
3.2.1 设计思路
?状态机:将系统划分为明确的状态,每个状态代表系统的一种工作模式(如撤防、布防、报警、密码输入)。状态之间通过事件触发进行转换。
?表驱动:使用状态转换表来定义状态之间的跳转规则,避免大量嵌套的if-else或switch-case,使逻辑更简洁且易于修改。
?模块化:将状态转换逻辑与具体动作分离,降低耦合度,提升代码复用性。
直接上代码:
#include "stm32f10x.h"// 系统状态枚举typedef enum{ STATE_DISARMED, // 撤防 STATE_ARMED, // 布防 STATE_ALARM, // 报警 STATE_PASSWORD // 密码输入} SystemState;// 事件枚举typedef enum{ EVENT_BUTTON1_PRESS, // 按键1按下(布防/撤防) EVENT_BUTTON2_PRESS, // 按键2按下(密码输入) EVENT_SENSOR_TRIGGER, // 传感器触发 EVENT_PASSWORD_OK, // 密码正确 EVENT_PASSWORD_FAIL, // 密码错误 EVENT_RESET_ALARM // 复位报警} EventType;#define PASSWORD_LEN 4unsigned char password[PASSWORD_LEN] = {1, 2, 3, 4}; // 示例密码unsigned char input[PASSWORD_LEN];unsigned char input_index = 0;SystemState current_state = STATE_DISARMED;volatile unsigned char event_flag = 0; // 事件标志// 传感器读取unsigned char read_sensors(void){ return (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) | (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_1) 1));}// 密码验证unsigned char check_password(void){ for (unsigned char i = 0; i { if (input != password) return 0; } return 1;}// 动作函数void start_password_input(void){ input_index = 0; GPIO_SetBits(GPIOB, GPIO_Pin_1); // LED提示输入}void trigger_alarm(void){ GPIO_SetBits(GPIOB, GPIO_Pin_0 | GPIO_Pin_1); while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); USART_SendData(USART1, 'A');}void reset_alarm(void){ GPIO_ResetBits(GPIOB, GPIO_Pin_0 | GPIO_Pin_1);}void switch_state(void){ current_state = (current_state == STATE_ARMED) ? STATE_DISARMED : STATE_ARMED;}void password_fail(void){ GPIO_SetBits(GPIOB, GPIO_Pin_0 | GPIO_Pin_1); for (volatile uint32_t i = 0; i 50000; i++); // 短促报警 GPIO_ResetBits(GPIOB, GPIO_Pin_0 | GPIO_Pin_1);}// 状态转换表typedef struct{ SystemState current_state; EventType event; SystemState next_state; void (*action)(void);} StateTransition;StateTransition transition_table[] ={ {STATE_DISARMED, EVENT_BUTTON1_PRESS, STATE_PASSWORD, start_password_input}, {STATE_ARMED, EVENT_SENSOR_TRIGGER, STATE_ALARM, trigger_alarm}, {STATE_ARMED, EVENT_BUTTON1_PRESS, STATE_PASSWORD, start_password_input}, {STATE_ALARM, EVENT_RESET_ALARM, STATE_ARMED, reset_alarm}, {STATE_PASSWORD, EVENT_PASSWORD_OK, STATE_ARMED, switch_state}, {STATE_PASSWORD, EVENT_PASSWORD_FAIL, STATE_DISARMED, password_fail}};// 状态机处理void process_event(EventType event){ for (int i = 0; i sizeof(transition_table) / sizeof(StateTransition); i++) { if (transition_table.current_state == current_state && transition_table.event == event) { current_state = transition_table.next_state; if (transition_table.action != NULL) { transition_table.action(); } break; } }}// 定时器中断服务void TIM2_IRQHandler(void){ if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) { TIM_ClearITPendingBit(TIM2, TIM_IT_Update); event_flag = 1; // 仅设置标志位 }}int main(void){ // 时钟配置 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOC | RCC_APB2Periph_USART1, ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); // GPIO配置 GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(GPIOA, &GPIO_InitStruct); // 传感器 GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStruct); // 蜂鸣器和LED GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOC, &GPIO_InitStruct); // 按键 // USART1配置 GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStruct); // TX USART_InitTypeDef USART_InitStruct; USART_InitStruct.USART_BaudRate = 9600; USART_InitStruct.USART_WordLength = USART_WordLength_8b; USART_InitStruct.USART_StopBits = USART_StopBits_1; USART_InitStruct.USART_Parity = USART_Parity_No; USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_InitStruct.USART_Mode = USART_Mode_Tx; USART_Init(USART1, &USART_InitStruct); USART_Cmd(USART1, ENABLE); // TIM2配置(10ms中断) TIM_TimeBaseInitTypeDef TIM_TimeBaseStruct; TIM_TimeBaseStruct.TIM_Period = 10000 - 1; // 10ms TIM_TimeBaseStruct.TIM_Prescaler = 7200 - 1; // 72MHz / 7200 = 10kHz TIM_TimeBaseStruct.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseStruct.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStruct); TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); TIM_Cmd(TIM2, ENABLE); // NVIC配置 NVIC_InitTypeDef NVIC_InitStruct; NVIC_InitStruct.NVIC_IRQChannel = TIM2_IRQn; NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0; NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStruct); while (1) { if (event_flag) { event_flag = 0; // 检测事件并处理 if (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_0) == 0) { process_event(EVENT_BUTTON1_PRESS); while (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_0) == 0); // 防抖 } if (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_1) == 0) { input[input_index++] = 1; // 简化为按键输入1 GPIO_ToggleBits(GPIOB, GPIO_Pin_1); // LED闪烁 while (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_1) == 0); // 防抖 if (input_index == PASSWORD_LEN) { if (check_password()) { process_event(EVENT_PASSWORD_OK); } else { process_event(EVENT_PASSWORD_FAIL); } } } if (read_sensors() != 0 && current_state == STATE_ARMED) { process_event(EVENT_SENSOR_TRIGGER); } if (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_1) == 0 && current_state == STATE_ALARM) { process_event(EVENT_RESET_ALARM); } } }} 有点看傻眼了吧?
这只是一个伪代码模型,实际上无际单片机特训营项目6的功能,远比这个复杂,可以说不掌握这些架构,这个项目根本做不稳定。
0lw4x53yyqt6404336348.png

好了,不吹牛了,哈哈,继续聊上面的代码。
3.2.2 这代码牛在哪?
?清晰性:状态机将系统行为分解为独立的状态,逻辑一目了然。
?可扩展性:只需修改transition_table,即可添加新状态或事件,无需更改核心代码。
?可维护性:动作函数与状态转换分离,调试和修改更方便。
?低耦合:状态逻辑与硬件操作解耦,增强代码复用性。
3.2.3 与前两层的区别
第一层:可能是简单的顺序逻辑或条件分支,代码紧耦合,难以扩展。
第二层:可能引入函数封装或简单状态管理,但仍依赖硬编码逻辑。
第三层:通过状态机和表驱动实现高级架构,强调设计上的优雅与灵活性,而非功能的增加。
这种设计不仅满足防盗报警主机的功能需求,还体现了大师级的架构思维。
4. 最后总结下
单片机软件开发,说简单也简单,说难也真挺难。它考验的不光是你的编程功底,还有你对硬件的理解、对工程的把控。代码写得好,不仅能解决问题,还能大大提高开发效率,这种成就感是别的行业给不了的。
技术是门手艺活,熟能生巧。别怕出错,错了就改,改了再错,错着错着你就对了,有点啰嗦,但绝对真理。
end
suxmdx2rrmf6404336448.jpg

下面是更多无际原创的个人成长经历、行业经验、技术干货。
1.电子工程师是怎样的成长之路?10年5000字总结
2.如何快速看懂别人的代码和思维
3.单片机开发项目全局变量太多怎么管理?
4.C语言开发单片机为什么大多数都采用全局变量的形式?
5.单片机怎么实现模块化编程?实用程度让人发指!
6.c语言回调函数的使用及实际作用详解
7.手把手教你c语言队列实现代码,通俗易懂超详细!
8.c语言指针用法详解,通俗易懂超详细! |
|


















 窥视卡
窥视卡

 置顶卡
置顶卡 变色卡
变色卡