|
|

|
30m432iej3r640467531.gif

8 {6 L) m& B* i a( \5 X8 u点击上方蓝色字体,关注我们
" f( r4 o, t5 \" A( P8 r# ^! M$ S. o9 ?6 r. T4 b
- x9 s* A0 E8 C9 Q9 k2 r: T
看门狗的基本原理是通过一个定时器来监测系统运行状态。正常情况下,应用程序需要定期向看门狗发送信号(喂狗),以防止定时器溢出。 Z( H! m+ m' \1 V( Z! Y
7 a6 d" T0 m* v1 c
一旦程序发生异常,导致看门狗未能在规定时间内收到喂狗信号,定时器将会触发系统复位。+ j p }% ~) r% m y6 E
$ Z @( {" q8 D" p2 R( r
根据实现方式的不同,看门狗可以分为硬件看门狗和软件看门狗。
$ V8 c) S! A. }9 O
( @8 Y/ E4 t: `" B+ ^& O
4gkt5o5bsb3640467631.png

0 g, ~4 q2 P* S8 g$ i1
+ Y1 V) ?. w( ~9 `硬件看门狗3 ]) _, x4 Z% T( W* S6 U4 ]; U
1.1、外部独立硬件看门狗4 E7 w* z4 y- F# C v/ H
ajrddgejbsb640467731.png
 ; L6 G3 u D, |) V/ \% _1 l7 ~
; L6 G3 u D, |) V/ \% _1 l7 ~
. q2 q( R' r& {7 C; p+ b) L
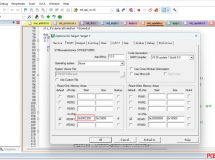
特点: d j( `" D1 A. L3 I9 D9 g# M; `; n
作为独立于MCU/MPU的外部芯片运行不受主处理器影响,即使处理器死机仍可触发复位可靠性最高,适用于工业、汽车、航天等对可靠性要求极高的应用场景2 a: E) w# T# e. i4 {7 b
" m0 f/ E' k Q6 p* o6 d+ {0 q* H5 k% h& x+ C+ G# Q# y
工作方式:2 O5 Y6 Z# k" Z- v `) y3 V
MCU 通过 GPIO 向看门狗芯片发送喂狗信号(例如周期性地翻转一个引脚)若 MCU 失去响应,外部看门狗检测到超时,则输出复位信号由于其独立性,该类看门狗的喂狗时间通常不可调或调整较受限2 g* B$ k% G7 c9 ~" v5 o
. r8 T7 S6 x& {, c7 }, ]1.2、内置硬件看门狗
. K9 l- D: N9 S特点:
. A. ?0 Q3 o y: r4 j1 u0 J5 F由处理器内部的定时器实现,通常由 MCU 内部的 WDT 外设负责管理需要软件驱动程序支持,可编程设置超时时间复位逻辑依赖于 MCU 自身,一旦 MCU 时钟或电源管理单元故障,可能导致看门狗失效
- D& B$ l" o% m& N' D7 ]- @
5 T7 @) P: v/ f6 W: f+ N' ]* ^+ X) j) T, @7 d; L8 G3 V
工作方式:& w( o* E5 ~ ?
在应用程序中启用 WDT 并设置适当的超时时间定期调用 API 进行喂狗(如 STM32 的 HAL_IWDG_Refresh())若 MCU 进入死循环或阻塞,看门狗超时触发系统复位4 E P. E6 W0 i+ W1 n& u+ w
8 ?& I3 h4 v9 Y: c" E7 k2: V2 V% R) \& e& |7 Q; @1 P
软件看门狗
0 D/ W# x) \( Z特点:
& ]# ?1 O f4 Z" t通过软件定时器模拟看门狗功能依赖系统的定时器中断,若中断系统异常,可能会失效适用于轻量级应用,但可靠性远低于硬件看门狗
' y9 f' \. ?: F) l; Z: w0 _! M! _! D; D1 l" h4 B) E
: D- W! ~. j- l' k工作方式:
, z2 `, E7 { r! t在任务调度器(如 FreeRTOS)中实现定时检查任务正常运行时定期重置软件定时器若某任务超时未喂狗,则触发复位逻辑
+ ^' g( R; t7 F4 Q. b @' w! q: P4 F, @2 l+ s
在调试过程中发现的故障,应该通过代码优化、异常处理、错误恢复机制等手段加以解决,而不是依赖看门狗。
# x' Q! b8 q" w1 g" h
+ k* p/ Y$ v. d3 y) ~看门狗的作用是在非人为可控情况下自动恢复系统,它不能取代良好的软件工程实践。
$ J1 }) J3 c. c
# L+ y7 I! o' B1 _在某些应用场景(如数据采集系统),系统崩溃时可能需要保护关键数据,以便在重启后进行恢复。2 E$ w" ?& }$ W2 J
8 N! b2 L! w3 c$ L: e这可能需要:
8 Z* S/ G- Q! M( A }6 t/ G/ z采用EEPROM、Flash 或电池备份 RAM 存储关键变量结合上电自检(POST)机制,分析重启原因,决定是否进入故障恢复流程. ?' {7 J% a! \
& S. G" V. R4 Q3
* M: d; n1 }8 }" M/ I, a看门狗喂狗策略( ?- U& i, U6 l+ f
避免在主循环或高频中断中盲目喂狗:这样可能会掩盖实际的问题,导致系统在异常情况下仍然喂狗,无法及时复位。解决方案:在关键任务执行完毕后喂狗,而不是简单地在循环内喂狗。结合任务超时检测(对于 RTOS):可以使用任务看门狗(Task Watchdog),在任务级别进行超时监测,而非仅靠系统级 WDT 进行复位。多级看门狗策略:采用软件看门狗监测任务,硬件看门狗监测整个系统,以构建更健壮的故障恢复机制。. X3 {& [2 b8 x2 N0 S( z
看门狗是一种保障系统稳定性的关键机制,但它并不能取代软件优化和异常处理。! e& r! S* F- B; g
' M" u3 Y( j% K3 Q; [
在高可靠性应用中,外部硬件看门狗是最佳选择,而在一般嵌入式应用中,内置硬件看门狗已经足够。. k3 _) f0 _ J4 j/ X- A
3 }6 F; f( v( `1 }
软件看门狗可以作为任务级监测的补充手段。
8 L# N1 D Z- ]
" w4 i9 b4 k" `0 g合理利用不同类型的看门狗,结合健壮的软件架构,才能真正提升系统的稳定性和可靠性。
( `# Q! @: ?; Y6 j9 A8 x
neiqvdt43bo640467832.jpg

; T" \2 [ N- }5 j) j
4hoxr3bhvct640467932.gif

5 E( D- ~+ j3 \: a点击阅读原文,更精彩~ |
|


















 窥视卡
窥视卡

 置顶卡
置顶卡 变色卡
变色卡