|
|

引言
# w; a+ s/ V8 B. ^" S8 G+ f) U随着自动驾驶汽车的发展,对不依赖GPS信号的微型光学陀螺仪的需求日益增长。在硅芯片上制造的氮化硅(SiN)谐振光学陀螺仪因具有超低损耗波导、小型化尺寸以及与CMOS工艺兼容等特点,成为满足这一需求的理想技术平台[1]。2 K- p/ K9 r) J- v% O) _' S
5 F5 S% ?1 [( Y
1
- Z. L; _, d. M: l工作原理
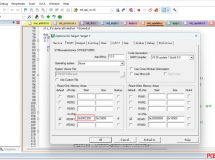
~2 R5 ^0 B, b- ^" A谐振光学陀螺仪的工作原理基于萨格纳克效应:当系统旋转时,相向传播的光束经历不同的光程。在环形谐振器中,光通过光耦合器耦合进入波导环路。当光频率满足环形谐振器的谐振条件时,光经过多次往返后通过相长干涉在环内累积。- K n% i% [! t: f5 j
oxn2i1kc32u640593057.png

: A+ A9 [# b/ w; V, b图1:环形谐振器示意图,显示输入波导通过耦合器与长度为L、功率损耗为α的环形波导耦合。
, A% f+ C$ S, z
' b. c8 V; [% c/ W为实现陀螺仪功能,光被同时注入环形谐振器的顺时针(CW)和逆时针(CCW)方向。当环形谐振器静止时,两个方向具有相同的谐振频率。但在旋转状态下,由于萨格纳克效应导致两个方向的谐振频率产生大小相等、方向相反的移动,这种频率移动与旋转速率成正比。通过测量CW和CCW谐振频率之间的差值,可以确定施加的旋转速率。
l- F0 _' d/ l6 L' w
mzqh2c21sd1640593157.png
 - ~) ^: F& E, Y, I; Z* @- P
- ~) ^: F& E, Y, I; Z* @- P
图2:(a)环形谐振器中相向传播光的示意图。(b)静止和(c)旋转状态下CW和CCW信号的传输谱,展示了由萨格纳克效应引起的谐振频率分裂。
" t: h/ [3 l7 X( X7 Y+ l! y% a+ X3 `) y* G
2" d( M! `: _( O: Y5 \0 b- \5 }# x
氮化硅平台
: H- O3 o$ s- \氮化硅具有以下优势,使其成为制造微型谐振陀螺仪的理想材料:# Z! i2 D9 W9 g1 Y
! |; V. W# T5 J5 }! f
传播损耗极低(低至0.034 dB/m),实现高达7亿的品质因数;. b0 s. w# |1 h2 w8 r
可在芯片上制造光耦合器等光学元件;8 P5 c& {! ^. F0 \
与CMOS工艺兼容,便于规模化生产;
( o' }% O; ]; K2 x( A" S) l9 m3 k% G与其他集成波导平台相比,具有更低的背向散射系数。% r$ H+ K# V$ e. j+ E
6 ~: m' w4 \% g1 V) l7 P& ~
第一代氮化硅谐振陀螺仪采用周长37毫米、精细度为1270的跑道型谐振器设计。第二代采用多圈螺旋设计,总长度1.2米的波导盘绕在直径6.1毫米的区域内。4 j- p% @. s" D. n1 I( S: l/ t2 a
5lujodzrugy640593257.png

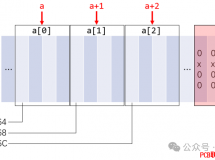
( W4 u. b U1 l& s+ G& a图3:(a)第一代SiN跑道型谐振器照片。(b)波导横截面尺寸示意图。1 T# K- K7 j4 V3 m) }+ s$ s |
/ @ X8 e3 c5 o( [- t6 P
rkjffjbgzhd640593358.png
 # j" Y: H: C. w+ d. a" {
# j" Y: H: C. w+ d. a" {
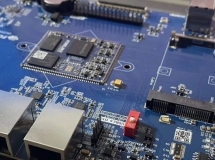
图4:(a)第二代多圈螺旋谐振器照片。(b)波导布局和光纤连接示意图。* l+ C$ K. u' b" q2 G4 |4 F
; \9 e p/ M2 E$ a2 _7 S, t3( L5 R7 Z& r$ e' t5 M
实验配置9 d/ x- E4 p4 l! q) F. d2 P
氮化硅谐振陀螺仪的表征实验装置采用窄线宽激光源,经过相位调制后分为CW和CCW两路。相向传播的信号通过光环形器耦合进入环形谐振器。平衡光电探测器测量CW和CCW输出功率的差值以提取旋转信号。
* ^6 {9 t; {6 A3 l0 ^
ukbnzgqbcmi640593458.png
 ! V" y |8 i2 o4 T7 v
! V" y |8 i2 o4 T7 v
图5:氮化硅谐振陀螺仪的完整实验示意图,显示光学和电气连接。9 @+ p% I3 j4 v" b/ D% D% w' h; h
' ~+ v8 y1 M5 H5 \" e
使用庞德-德雷弗-霍尔技术将激光频率锁定在环形谐振器的谐振频率上。可变光衰减器用于平衡CW和CCW功率,以最小化非线性效应。当施加旋转时,由萨格纳克效应引起的谐振频率移动在平衡探测器上产生与旋转速率成正比的输出信号。
2 l6 W* [$ f5 J- u* c$ h, D8 v- I- Y
4 ^, Y) s8 ~- ?" g1 W
性能与噪声来源
3 t# g- E, ^3 W陀螺仪的关键性能指标是角度随机游走(ARW)和漂移。ARW量化短期噪声并决定最小可探测旋转速率。漂移则表征长期稳定性和精度。
3 M. `+ c6 R0 u) g0 R3 T
3 ]+ K1 H1 [8 F' y' ?. J谐振陀螺仪中的主要噪声来源包括:探测器噪声(与功率无关)、散粒噪声(与功率平方根成正比)、激光相对强度噪声、激光频率噪声和背向散射噪声。; Z5 K. V p' a+ P$ w* @+ d
xnol4nh5fzb640593558.png
 * B" m+ C) v7 \1 n/ V) y, w% Q8 `+ s
* B" m+ C) v7 \1 n/ V) y, w% Q8 `+ s
图6:多圈陀螺仪使用10千赫线宽激光时测得的ARW随背向散射系数的变化,显示不同噪声源的贡献。
" Q4 V X% P" e6 s- G
F) t/ ?! ]: L! n7 l; D7 J) {第一代跑道型陀螺仪实现了80度/小时/√Hz的ARW和4000度/小时的漂移,主要受背向散射噪声限制。第二代多圈设计通过更长的波导长度和更低的精细度降低了背向散射噪声。当使用90赫兹线宽激光时,实现了6.7度/小时/√Hz的ARW和250度/小时的漂移,性能提升了一个数量级以上。
4 L' b& O4 J! j$ `9 w
fjk4zm3tvcy640593658.png

$ X- v. d6 l9 n图7:多圈陀螺仪分别使用10千赫和90赫兹线宽激光时的最佳艾伦方差曲线对比,显示使用更窄线宽光源带来的显著改进。' D; X: j5 d' R7 `3 j
$ @' C* O8 I& x, ~9 W u5, Y$ E4 A0 A" Y) y+ [4 z) C
最新进展
1 Q$ \% h; \! x多项技术创新促进了氮化硅谐振陀螺仪性能的显著提升。多圈螺旋设计通过将波导长度从37毫米增加到1.2米,同时保持相似的占用面积,使精细度降低了约33倍。由于背向散射信号的功率与精细度的平方成正比,精细度的降低使背向散射信号的功率降低了约1100倍。此外,更长的波导在给定频率调谐范围内提供了更多谐振模式,增加了找到低背向散射系数谐振模式的概率。! G8 O8 Y- }9 S! Z
- C) f1 j. V& c4 I4 t- i* B使用超窄线宽激光进行探测显著降低了频率噪声和背向散射噪声。当激光线宽从10千赫降低到90赫兹时,这两种噪声都降低了约10倍,与理论预测一致。这种降低是因为激光频率噪声与线宽的平方根成正比,而在相干长度远大于有效光程的情况下,背向散射噪声遵循相同的规律。
1 x1 ]1 U7 N7 D6 ]6 g, w3 G# P4 Y4 N+ o, r! I5 z! B# E6 {, q
通过系统地用熔接替换机械连接器,显著降低了漂移。原始配置中包含12个斜角抛光连接器(APC),每个连接器都可能因温度引起的失准而产生偏振耦合漂移。通过将其中6个APC替换为经过优化的保偏熔接,漂移从3000度/小时降低到400度/小时。
$ ]2 _9 y* d" m6 E \
, m& M: j- e4 ~, Q平衡探测技术对消除激光相对强度噪声和频率噪声等共模噪声非常有效。目前的平衡探测方案实现了约18分贝的共模抑制,这一性能受限于现有商用探测器的规格。如果能进一步提高共模抑制,ARW有望在达到背向散射噪声限制之前降低到1.2度/小时/√Hz以下。
! w) ^0 t3 e5 F7 z* h8 a7 X
! W. m3 i: N' w6 B/ }, H+ Q未来的技术发展方向包括:通过自注入锁定到高Q值SiN谐振器实现赫兹级线宽的半导体激光器,将更多光学功能集成到芯片上以减少光纤连接及其相关的漂移源。将调制器、探测器甚至激光源集成到SiN平台上,可能实现一个完全集成的解决方案,具有更好的稳定性和更小的尺寸。
6 m& ]' S. X5 n- W) I! i8 X4 B1 x6 g
氮化硅光子技术的进步正在推动芯片级陀螺仪的发展。CMOS兼容工艺、超低传播损耗(现已达到0.034 dB/m)以及集成多种光学功能的能力,使这一平台能够满足自主导航系统的严格要求。目前的研究重点是进一步降低噪声和漂移,同时提高集成度,以实现实用的、战术级的小型化陀螺仪。) _% n0 _) Q" t; S
* M G6 i; j( q; p E6 i参考文献' e% }9 j3 u; F2 `6 j
[1] N. Zawada, "Silicon-nitride resonant optical gyroscope with Earth-rate sensitivity," Ph.D. dissertation, Dept. Physics, Stanford Univ., Stanford, CA, USA, 2024.
& m& A0 {( A* Q& YEND
4 W3 |2 ?7 v7 {" F8 L1 A* R' K
$ O9 {% N$ F" \4 K* }9 p" j软件申请我们欢迎化合物/硅基光电子芯片的研究人员和工程师申请体验免费版PIC Studio软件。无论是研究还是商业应用,PIC Studio都可提升您的工作效能。
+ ?0 u0 L6 x/ ?- N6 {* a4 \8 A点击左下角"阅读原文"马上申请) R- L. E$ G& k O% B; I
4 T9 p! h/ ]: p! M: a
欢迎转载
2 y1 r' \2 d' [+ G
1 j/ r1 |+ R! X; H0 L. ~1 s转载请注明出处,请勿修改内容和删除作者信息!
# ^- ]# k! x) v2 v- R3 V) s7 e. F/ g8 K5 ^3 n1 v3 C
* r& L. ]. \' q8 Y4 b5 E) |" G
# `1 T7 V- M7 ?5 l5 e: g* K9 Y
zyrkbfekxcy640593758.gif
 7 r% X/ O u+ o& z6 L: G5 B
7 r% X/ O u+ o& z6 L: G5 B
9 I* j$ j5 m! [# B [
关注我们
6 K% P+ F6 T7 I0 X$ Y9 A8 x% \% S" T( O( u, L: J! I6 ^* P! E
2 q |: s, j0 u; B4 L
wn4bhonsal2640593858.png

- z. q, J2 ^5 l) y |
5 K& h; e' _9 ?' h5 x* h2 H6 _
gd43rdi0mwk640593958.png

C4 ?7 D& R5 Q: `5 T) q( A( G |
) I# M+ k( H" e) q* G
srnke4qh1f1640594058.png
 / a' B: t1 v5 r
/ a' B: t1 v5 r
|
& f& o* f3 D& ?: m! {: b8 `0 F
3 J: K# r- F0 N5 y- c' c
0 S4 ~8 m0 i# ~& X( X
$ M8 x a" R. _ l F9 q关于我们:
' b- {8 h2 n# f深圳逍遥科技有限公司(Latitude Design Automation Inc.)是一家专注于半导体芯片设计自动化(EDA)的高科技软件公司。我们自主开发特色工艺芯片设计和仿真软件,提供成熟的设计解决方案如PIC Studio、MEMS Studio和Meta Studio,分别针对光电芯片、微机电系统、超透镜的设计与仿真。我们提供特色工艺的半导体芯片集成电路版图、IP和PDK工程服务,广泛服务于光通讯、光计算、光量子通信和微纳光子器件领域的头部客户。逍遥科技与国内外晶圆代工厂及硅光/MEMS中试线合作,推动特色工艺半导体产业链发展,致力于为客户提供前沿技术与服务。 g ~; j! h O& G1 E; A
* E+ c3 j. P1 ?9 g( O8 L; B/ G
http://www.latitudeda.com/
' O$ S7 p4 n+ Y" h6 ], ]) A! O8 p( p(点击上方名片关注我们,发现更多精彩内容) |
|


















 窥视卡
窥视卡

 置顶卡
置顶卡 变色卡
变色卡