|
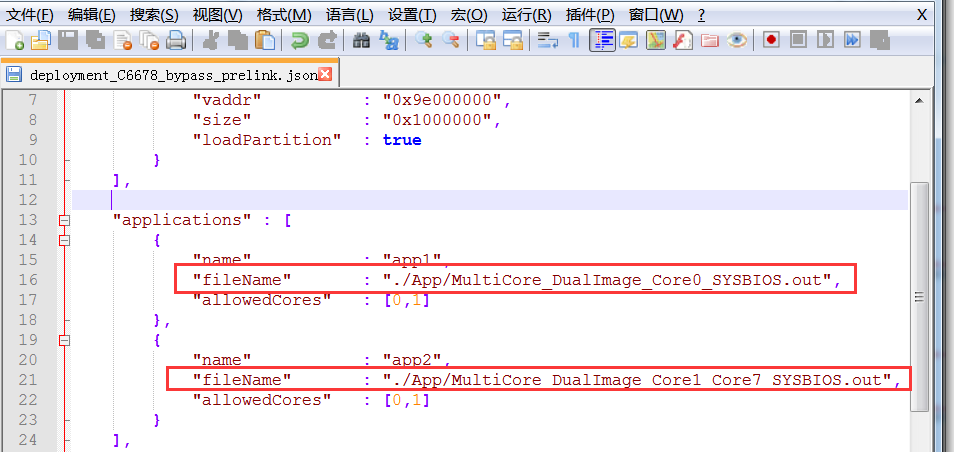
烧写多核多镜像文件 这里的GEL文件使用DSP_C6678_MultiCoreBoot.gel文件在光盘资料Images文件夹下。请提前安装好python 2.x以上版本,安装程序在文件夹"Demo\HostApp"下。 以下步骤实现将多核多镜像文件烧写到NAND FLASH,具体烧写步骤如下(部分类似烧写步骤参考上述小节,此处描述关键步骤,如需要烧写进NOR FLASH里面,可直接使用此GEL文件,用NorFlashWriter.out程序烧写即可)。 生成单个可烧写文件 在"Demo\HostApp\MultiCoreBoot\Image Create\Config"文件夹下用写字板打开deployment_C6678_bypass_prelink.json文件,修改对应多核镜像文件路径(存放在App目录下),然后保存关闭,如图所示:/ s4 y3 A/ |) G4 t0 V" J
 7 m6 ]1 a0 V( `/ t$ h' r* T
7 m6 ]1 a0 V( `/ t$ h' r* T返回上一级目录,以编辑方式打开Build.bat文件,修改C6000编译工具的路径和python的安装路径,保存关闭。再双击Build.bat文件,即可生成单个可烧写文件C6678-le.bin,保存在同级新生成的images文件夹下。 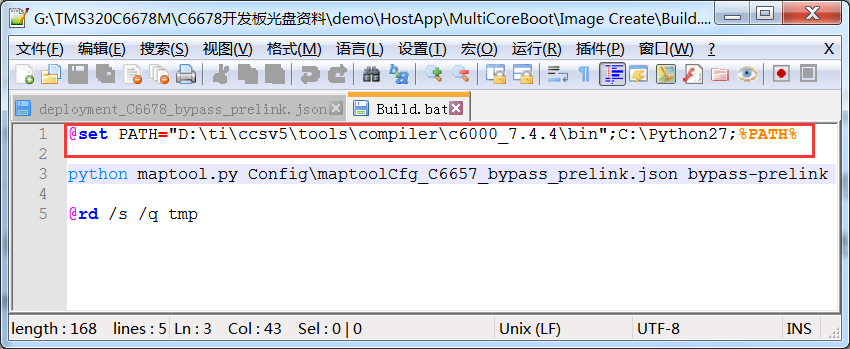 5 ?* e0 @$ S+ B
5 ?* e0 @$ S+ B 4 v7 f" u4 R# M& m0 t8 u 4 v7 f" u4 R# M& m0 t8 u
选用GEL文件
$ I6 f# b7 q! O4 |, Z 多核心IBL MAD启动镜像生成及使用已配置好.gel文件,在"Demo\HostApp\MultiCoreBoot\IBL Config"目录下的DSP_C6678_MultiCoreBoot.gel文件。 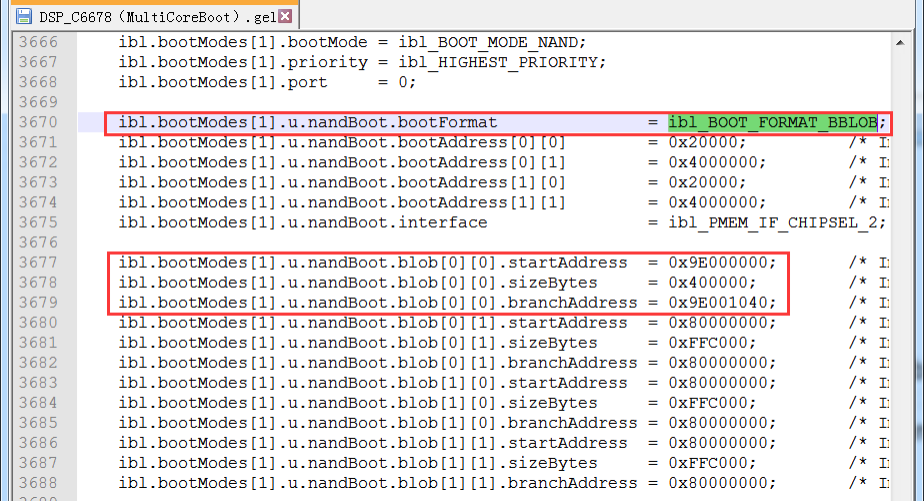 $ P% V; h/ |4 ], }1 ~- A6 ^7 V, q
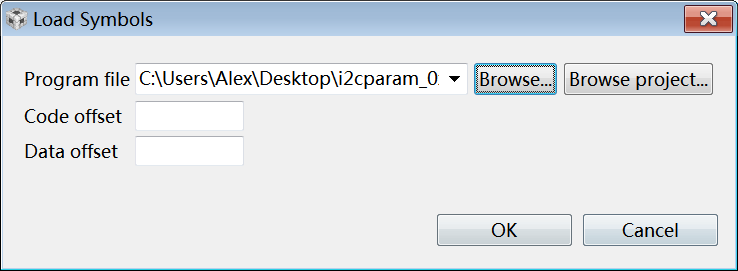
$ P% V; h/ |4 ], }1 ~- A6 ^7 V, q连接开发板CPU,加载i2cparam_0x50_tl6678_little_0x500.out文件,文件在文件夹"Demo\HostApp\MultiCoreBoot\IBL Config"下。! L. f8 `4 [# a: O3 l/ [
 8 g& m( p9 O( Y. A/ t7 V
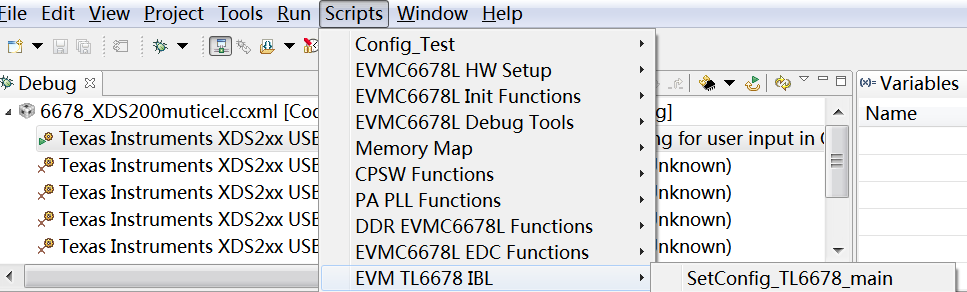
8 g& m( p9 O( Y. A/ t7 V加载后务必点击运行按钮,然后点解"Scripts->EVM TL6678 IBL->SetConfig_TL6678_main"(注:此处必须先运行i2cparam_0x50_tl6678_little_0x500.out文件,再在脚本下对IBL进行配置,否则会出现报错)。8 v9 T: C* s) ~0 p8 x
 6 W: j( Y- K* p& d) T) |
6 W: j( Y- K* p& d) T) |在Console窗口下,按入回车键。修改成功,该配置已成功保存到I2PROM里面。
7 H3 A9 q6 [1 _% T+ B  1 C' X2 J* g/ A) @% T 1 C' X2 J* g/ A) @% T
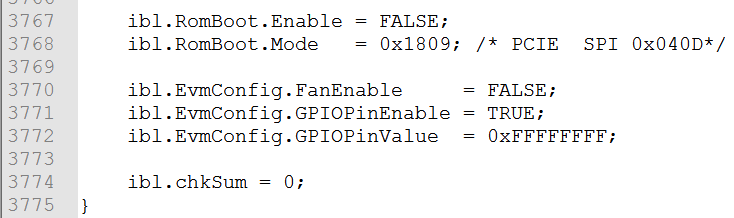
通过IBL配置从而支持全部的Rom启动模式,光盘里参考文档中有《DSP C6678启动模式汇总》。当ibl.RomBoot.Enable=TRUE;IBL会根据ibl.RomBoot.Mode设置的值修改启动配置寄存器然后跳转到Rom Bootloader执行剩余启动流程(注意,此时不会再执行IBL启动,所以需要IBL启动的话该配置项目应当设置为FALSE)。如图中设置ibl.RomBoot.Mode=0x00001809(仅低16位有效): V' V# d ?( ?$ e/ F
 0 O' w: b& M: ^! U! _# W 0 O' w: b& M: ^! U! _# W
加载多核镜像文件 按步骤加载烧写工具程序,修改C6678-le.bin程序文件名为app.bin。然后加载多核镜像文件,详细步骤如下。 加载烧写工具程序文件NandFlashWriter.out,如下图所示: 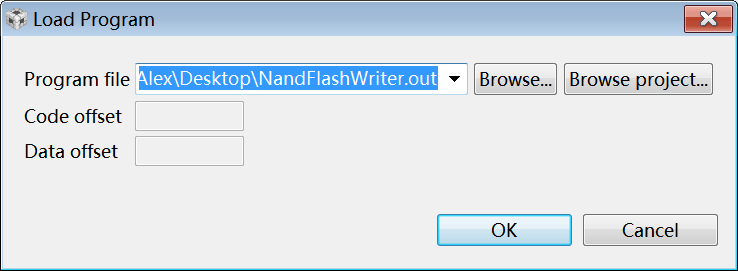 & x: y; S3 `4 t2 b; D' c
& x: y; S3 `4 t2 b; D' c加载程序镜像文件 点击CCS菜单栏"View->Memory Browser",在弹出的界面中点击"Save Memory"按钮,然后在下拉框中选择"Load Memory",如下图所示: 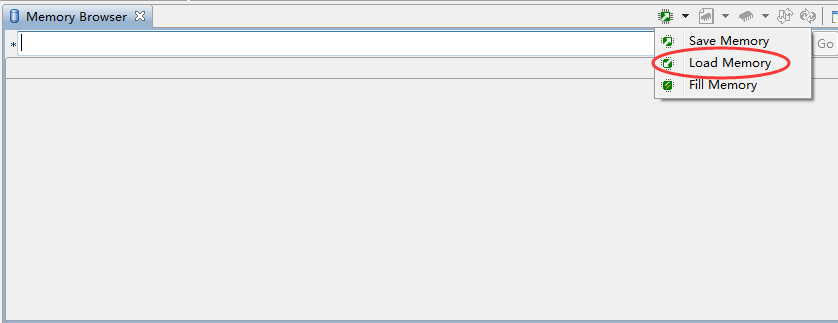 : t) ]3 x$ ~% h3 t! q : t) ]3 x$ ~% h3 t! q
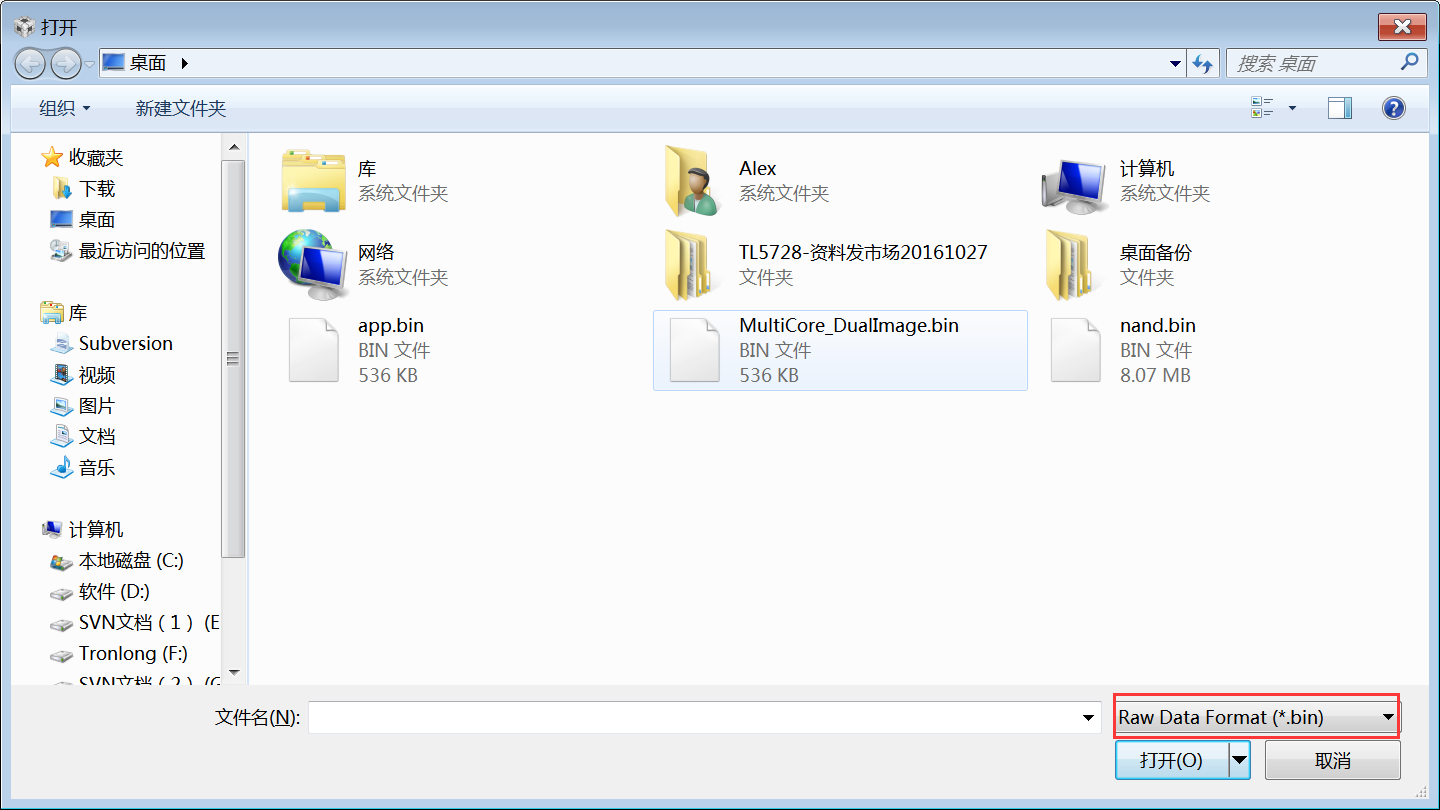
选择程序文件,文件类型选择"Raw Data Format(.bin)",如下图所示:8 M' p. B9 | N/ u( t# ^# e
 ) ?" {) c H7 p3 w" |
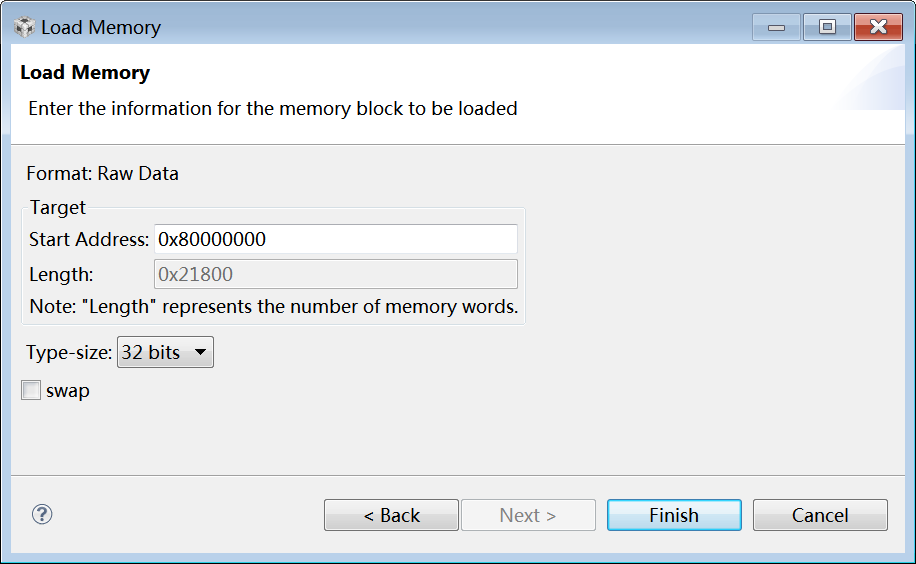
) ?" {) c H7 p3 w" |点击Next,在弹出的界面中输入起始地址:0x80000000,数据类型输入:32bits,然后点击Finish等待加载完成,如下图所示:/ @5 T/ _# c3 ]# P/ j% m f' x
 + G- x( L6 M) E0 y! i) m + G- x( L6 M) E0 y! i) m
点击运行按钮,开始烧写程序,烧写成功后Console提示信息类似下图:
) s) O; a) [/ n( j4 \3 \ 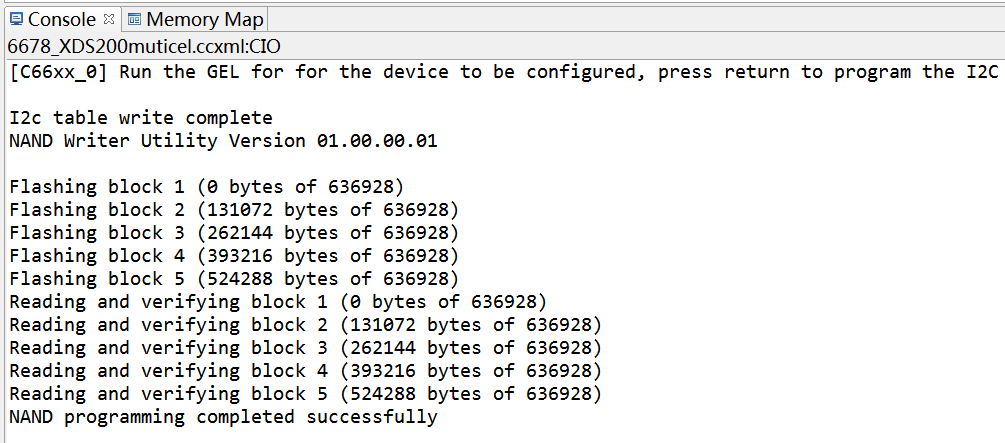 4 y0 O0 l. F7 P7 l' f# V$ r 4 y0 O0 l. F7 P7 l' f# V$ r
拔掉仿真器,开发板打到对应的启动档位,程序即会正常运行。( J6 s# @( ^5 N8 I/ W+ j! W8 ~) k
 / [( z3 G7 {, u1 Q / [( z3 G7 {, u1 Q
注:如果烧写进去程序后,程序没有运行起来,可通过以下方式验证启动镜像是否正确生成,步骤如下。 点击CCS菜单栏"View->Memory Browser",在弹出的界面中点击"Save Memory"按钮,然后在下拉框中选择"Load Memory",如下图所示: 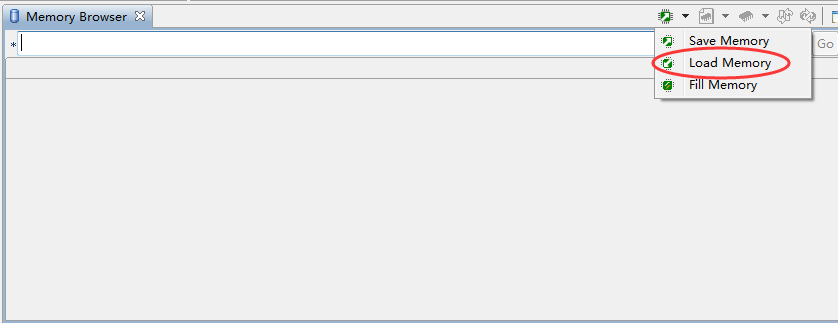 & n# ^- y9 Z& z# M" G1 p
& n# ^- y9 Z& z# M" G1 p选择程序文件,文件类型选择"Raw Data Format(.bin)",如下图所示: 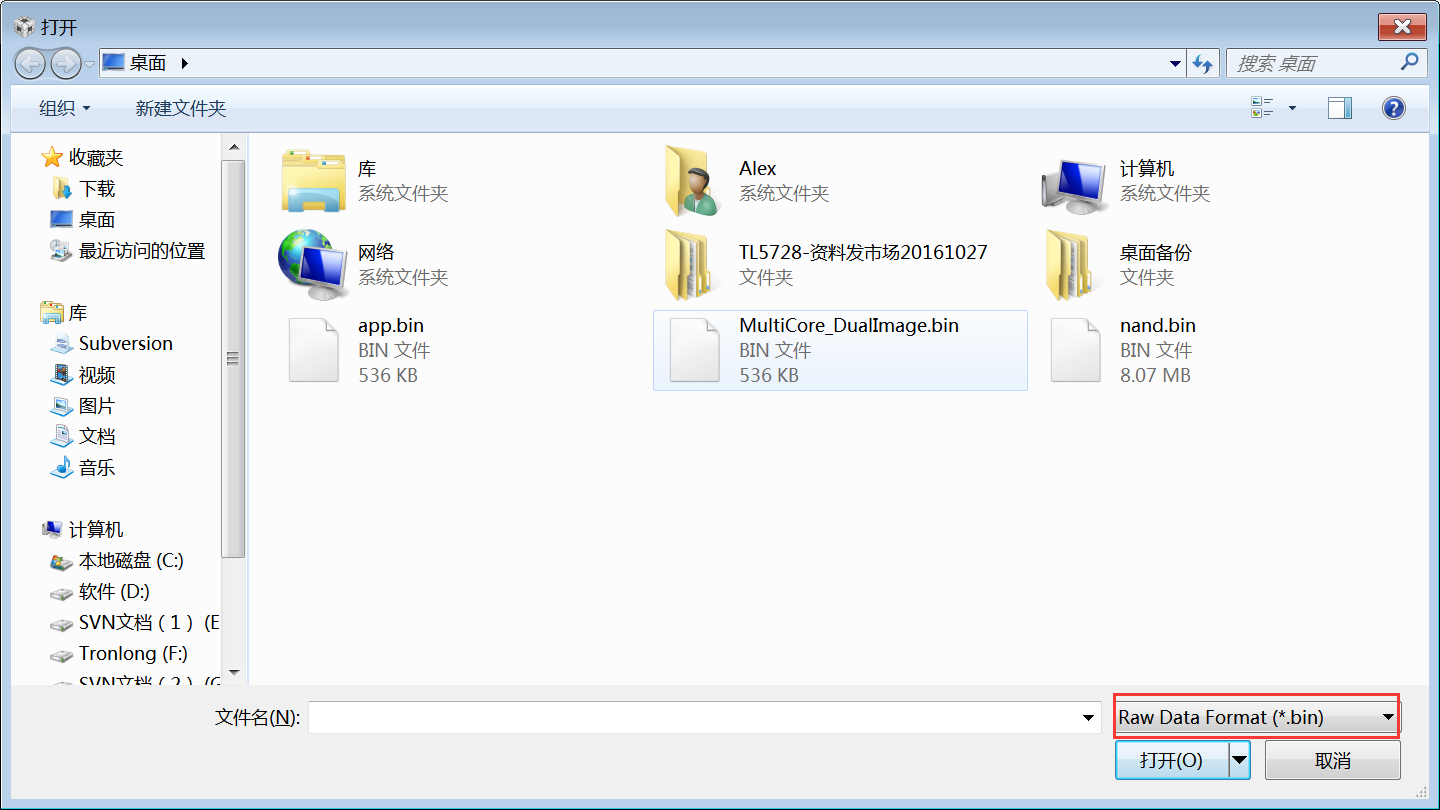 * c8 P, c8 {4 E * c8 P, c8 {4 E
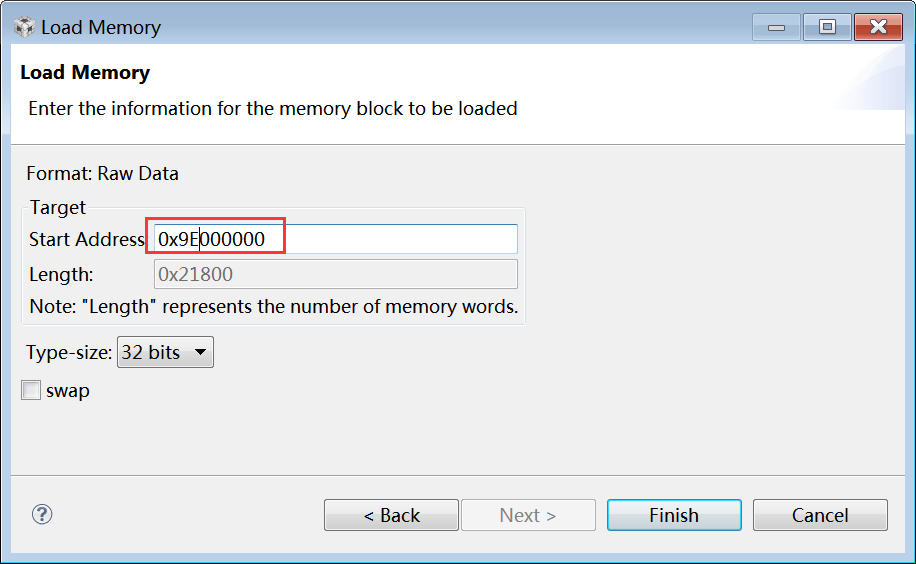
点击Next,在弹出的界面中输入起始地址:0x9e000000,数据类型输入:32bits,然后点击Finish等待加载完成,如下图所示:
- y* [ O; Y" @' `* k0 r! ? 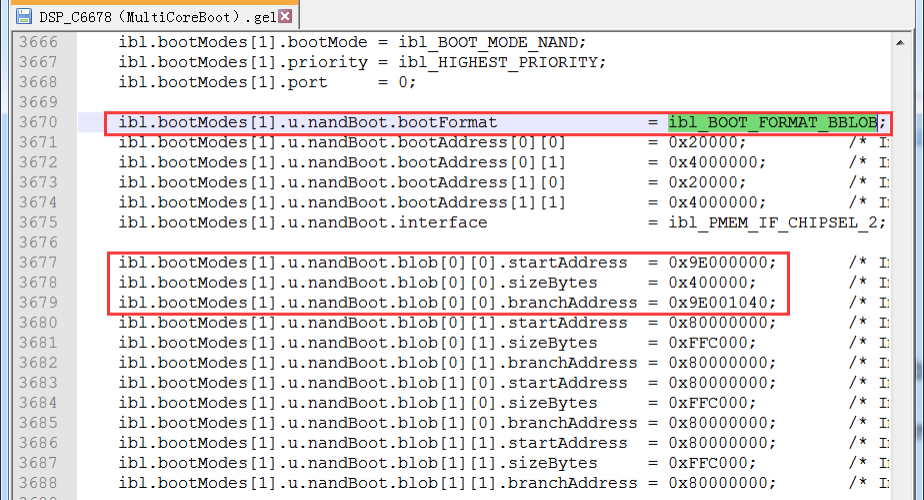 " Y. j$ y+ o. }& A$ ] " Y. j$ y+ o. }& A$ ]
 6 A! O1 i `& Z& a3 u/ @
6 A! O1 i `& Z& a3 u/ @修改DSP的地址CPU PC指针地址为0x9E001040:
' z- u# |4 y- a6 `+ C5 h 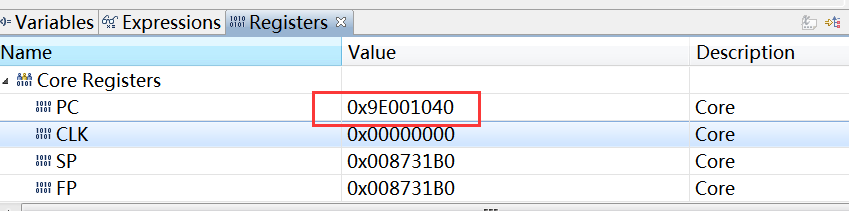 3 N- F. z4 n' A4 n' H4 _
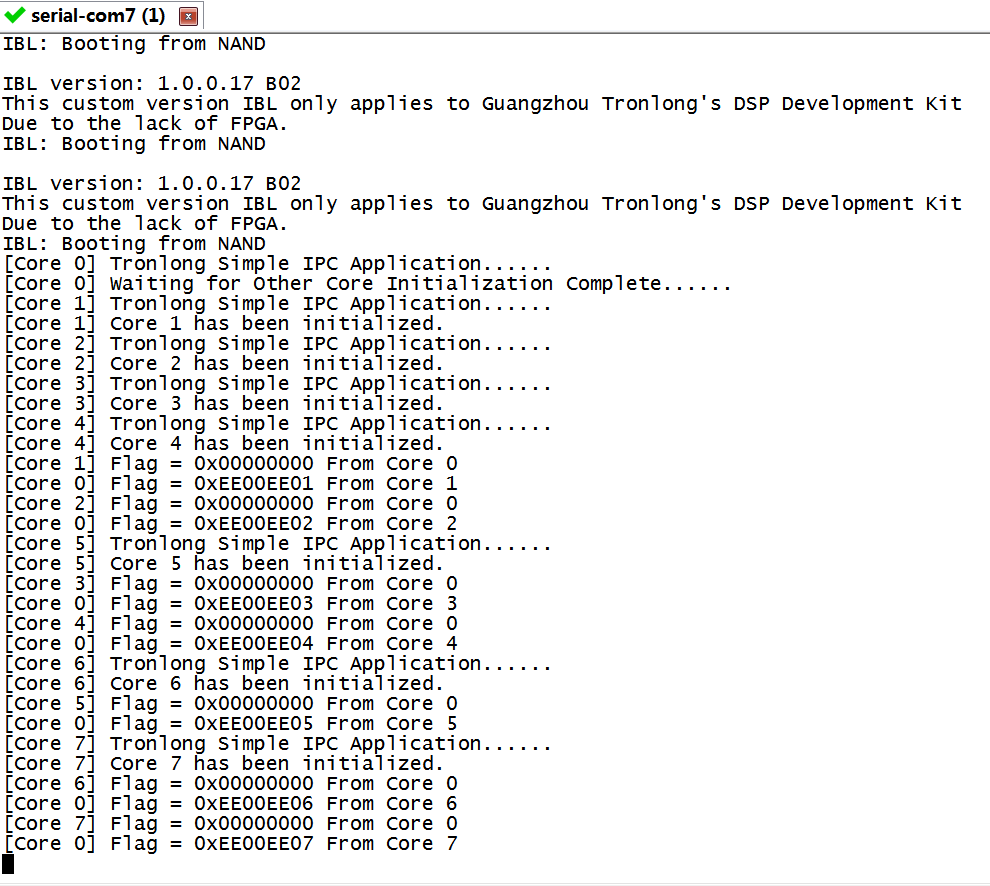
3 N- F. z4 n' A4 n' H4 _点击运行按钮,串口打印信息,和运行.out文件一样,证明程序生成无误,请查检其他操作是否规范:6 }% h, _- b% Z# A; q* k
1 I7 n' w% H m经典来袭!现在对6678F系列有兴趣的朋友福利来了!1 R: w# |+ e. j
TL6678F-EasyEVM评估板6 s4 Q3 D7 g( Z& x4 J
芯片架构:XC7Z045/XC7Z100-2FFG900I,集成PS端双核ARM Cortex-A9 + PL端Kintex-7架构28nm可编程逻辑资源。PS端主频最高可达1GHz,单核运算能力高达2.5DMIPS/MHz。- b& ~5 e* u2 v5 k: G% u
外设资源:1x FMC(HPC)、2x CameraLink(Base/Medium/Full)、2x CAMERA、4x SFP+、1x PCIe Gen2、1x SATA、2x HDMI、2x SGMII。支持PS、PL端通信、高速AD采集与处理、CameraLink视频采集与处理
0 |5 ~+ P2 Z' b: X: J. `( P应用领域:雷达探测 目标追踪 电子对抗 定位导航 图像处理 水下探测 光电探测 深度学习. u) U1 I% z% w% I% x
更多详情请查阅:) B" {, |, a4 N' D# T2 Z
①官方网站$ F0 M/ d+ @$ a; R* h
②官方TB:广州创龙电子科技有限公司 
; h4 ~/ \7 e/ K$ s$ `( J' E; y. P4 R
| 


















 窥视卡
窥视卡

 置顶卡
置顶卡 变色卡
变色卡